在如今的作業中,無人機路面巡查替代傳統的人工巡查,展現出巨大的效率優勢。像高速施工工地這樣的環境下,施工方為了保障施工安全,就需要對施工范圍進行嚴格管控,傳統的人工巡查效率低,受限于地形、時間等問題,容易出現盲點。相比人工,利用無人機進行AI識別則可以逐幀圖像監測,即便是夜晚也能夠利用紅外傳感器進行...
目標跟蹤基本參數
- 品牌
- 慧視科技
- 型號
- 可咨詢
- 輸出信號
- 數字型,定制
- 制作工藝
- 集成,薄膜,陶瓷,可定制
- 材質
- 可定制
- 材料物理性質
- 導體,磁性材料,定制
- 材料晶體結構
- 定制
- 加工定制
- 是
目標跟蹤企業商機
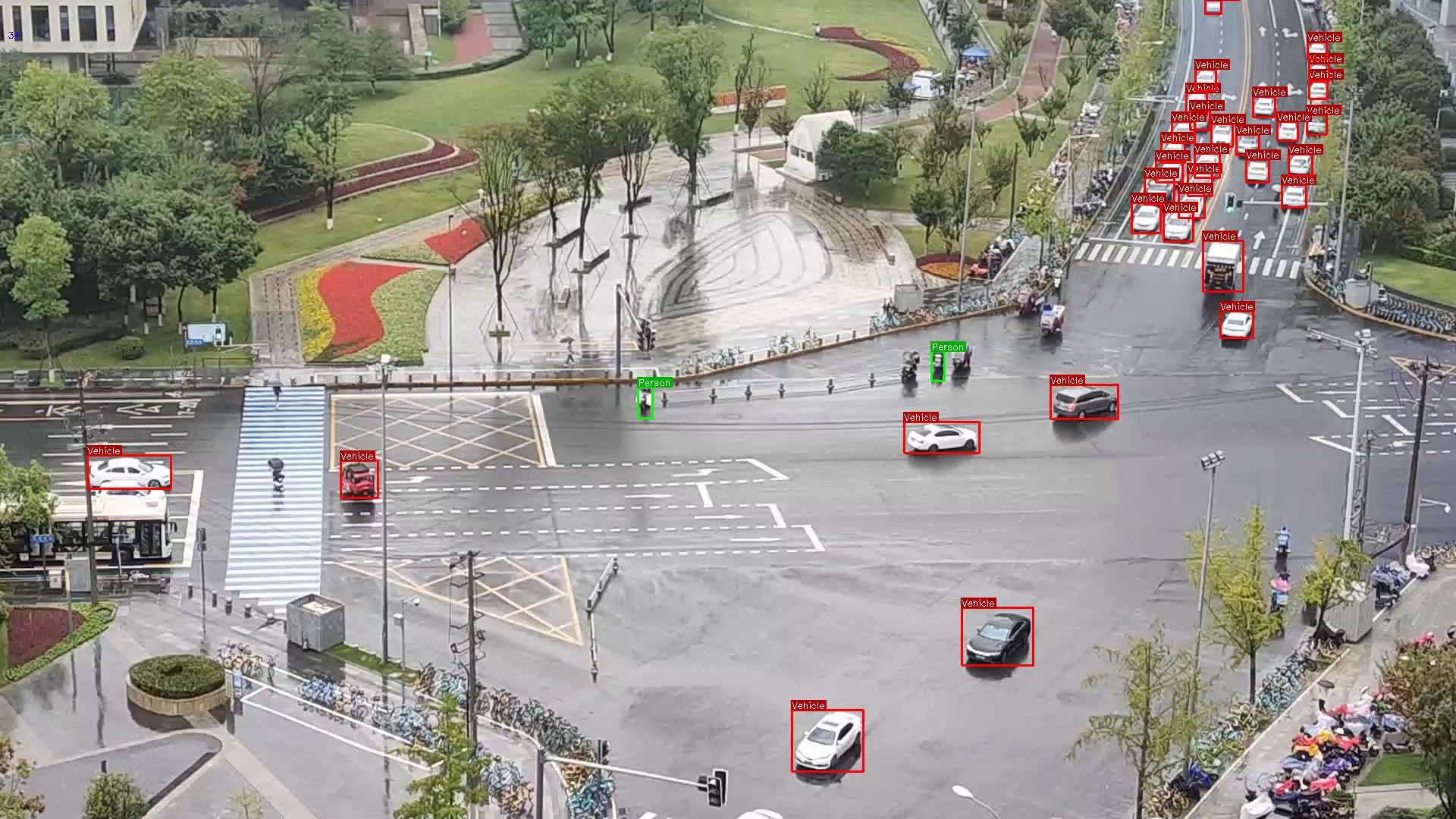
視頻自動跟蹤系統,一般都是用在露天的、較大地域范圍的監控系統中,且邊跟蹤邊錄像。在自動跟蹤系統的發展上,jun用上的視頻自動跟蹤、毫米波雷達跟蹤以及激光雷達跟蹤等是比較成熟的;非jun用領域,存在一些固定畫面、攝像機從不運動的的目標檢測與跟蹤系統;基于帶紅外線的、常用在演播室或者會議室的、很近距離的跟蹤系統,目前主要局限于簡單背景(如室內環境下)、大目標(即目標在視頻圖像中占較大區域),而且一般無法實現控制攝像機轉動來對目標進行跟蹤。慧視AI板卡可以用于大型公共停車場。專業目標跟蹤檢測
目標跟蹤
RK3588作為瑞芯微國產化旗艦級芯片,用在目標跟蹤領域,通常情況下跟蹤幀率都在50Hz左右,這已經足夠滿足大多數應用領域的需求。但在許多特殊領域,如軍備、邊防,高幀頻的視頻輸出能夠在極短的時間內捕捉到更多的畫面,實現高速動態場景的連續拍攝。高幀頻的目標跟蹤則能夠獲得更多的目標細節,便于做出下一步判斷。許多中低端性能的由于算力等因素無法達到這樣的需求,但RK3588作為性能怪,6.0TOPS的算力開發潛力無限。成都慧視就針對于這樣的需求場景,在硬件的支持下,定制開發出能夠支撐100Hz跟蹤算法,從而打造出能夠穩定實現100Hz目標跟蹤的整合方案。青海目標跟蹤型號目標跟蹤圖像分析是人工智能的重要組成部分。

基于視頻目標檢測和跟蹤的一般流程是:通過目標檢測,找到目標;對目標特征進行描述,初步估計目標的運動矢量;根據運動狀態,進入目標跟蹤,對傳感器的姿態,比如水平方位、垂直方位和焦距等進行調整;跟蹤到目標后,對目標特征進行更新,并對目標的運動進行預測后,進入下一輪的跟蹤過程。目標跟蹤檢測與跟蹤涉及到的技術細節很多。慧視光電開發的高性能目標跟蹤圖像跟蹤板在自研目標跟蹤算法的作用下,能夠實現高精度低延遲的視頻目標鎖定跟蹤。
東北虎作為生活在我國東北地區的保護動物,時不時會闖入居民區,給居民生命安全造成威脅,此前不就黑龍江七臺河市勃利縣一村落就出現了東北虎傷人事件,傷人后東北虎不知去向,消防和公安緊急尋找。值得關注的是,公安采用了無人機進行巡查,這種方式不僅比傳統的地毯式搜索效率更高,而且面對東北虎這樣危險的生物,安全性也更高。但是傳統的無人機需要手動操控觀察,同樣費時費力,想要更進一步提升效率,則可以通過無人機智能化建設實現。慧視微型雙光吊艙能夠實現晝夜成像。

SpeedDP作為一個服務型AI平臺,它能提供從數據標注、模型訓練、測試驗證到RockChip嵌入式硬件平臺模型部署的可視化AI開發功能。平臺所需算法并不是固定的,使用者可以根據自身實際應用場景進行AI算法的定制化開發,例如平臺經過不斷的迭代,目前能夠支持YOLOv8系列算法進行圖像標注。SpeedDP這個平臺使用起來十分簡便,在圖像標注領域其基本使用方法是:1.首先有一個比較好的預選模型2.用這個預選模型做自動標注3.后期人工審核修正慧視AI圖像處理板是高精度識別的板卡。重慶數據目標跟蹤
智能化的圖像處理板還可以實現自動化的數據分析,實現降本增效。專業目標跟蹤檢測
無人機的迅猛發展,使得無人機的反制技術也水漲船高,常見的有電子干擾、無人機識別對抗等方式。后者采用圖像識別技術,通過在無人機攝像頭的基礎上加裝AI高性能圖像處理板,在算法的作用下,就具備無人機識別的功能,為無人機對抗創造條件。由于無人機飛行速度極快,因此針對于這樣環境下的AI識別需要“與眾不同”的圖像處理板。我們都知道,當視頻幀率越高時,視頻越能夠體現畫面細節信息,而圖像識別算法正是逐幀進行識別,因此,攝像頭捕捉到的畫面細節越多,識別的精度就會越高。專業目標跟蹤檢測
與目標跟蹤相關的文章

低壓線目標跟蹤互惠互利
- 湖北如何目標跟蹤 2025-08-26
- 移動目標跟蹤解決 2025-08-26
- 什么目標跟蹤參考價格 2025-08-26
- 貴州省時省力目標跟蹤 2025-08-26
- 福建目標跟蹤售后服務 2025-08-26
- 四川目標跟蹤工程 2025-08-25
- 比較好的目標跟蹤批發商 2025-08-25
- 比較好的目標跟蹤報價行情 2025-08-25
- 陜西目標跟蹤有哪些 2025-08-25
- 無線目標跟蹤多少錢 2025-08-24
- 什么目標跟蹤型號 2025-08-24
- 安全目標跟蹤互惠互利 2025-08-24
與目標跟蹤相關的產品

與目標跟蹤相關的新聞
-
目標跟蹤銷售廠家 2025-08-24 10:11:36YOLO算法具有以下幾個明顯的優勢:快速高效:YOLO算法采用單次前向傳播的方式進行目標檢測和跟蹤,相比傳統方法的多次掃描圖像,速度更快,適用于實時應用。準確性較高:通過引入先進的卷積神經網絡和相關技術,YOLO算法在目標定位和類別預測方面具有較高的準確性。多尺度處理:YOLO算法通過特征金字塔網絡...
-
什么目標跟蹤聯系方式 2025-08-23 10:03:05對于目標被暫時遮擋的情況,通過設定目標狀態為暫時丟失狀態,并以上一次目標的位置和速度繼續對后續的目標位置進行預測,在后續圖像中可以再次重新找回目標。在攝像機控制時,采取估計提前量的控制策略也對跟蹤有很大的幫助。控制攝像機,使目標提前擺到視野中目標運動方向的另一側,可以為以后的跟蹤贏得更多的跟蹤時間和...
-
山東目標跟蹤進貨價 2025-08-23 04:11:53很多跟蹤方法都是對通用目標的跟蹤,沒有目標的類別先驗。在實際應用中,還有一個重要的跟蹤是特定物體的跟蹤,比如人臉跟蹤、手勢跟蹤和人體跟蹤等。特定物體的跟蹤與前面介紹的方法不同,它更多地依賴對物體訓練特定的檢測器。人臉跟蹤由于它的明顯特征,它的跟蹤就主要由檢測來實現,比如早期的Viola-Jones檢...
-
安徽電力應急目標跟蹤 2025-08-23 16:03:03YOLO算法具有以下幾個明顯的優勢:快速高效:YOLO算法采用單次前向傳播的方式進行目標檢測和跟蹤,相比傳統方法的多次掃描圖像,速度更快,適用于實時應用。準確性較高:通過引入先進的卷積神經網絡和相關技術,YOLO算法在目標定位和類別預測方面具有較高的準確性。多尺度處理:YOLO算法通過特征金字塔網絡...
與目標跟蹤相關的問題
新聞資訊
產品推薦
-

西藏哪些目標檢測
2025-08-25 -

青海快速目標檢測
2025-08-25 -
四川目標跟蹤工程
2025-08-25 -

湖南深度學習AI智能圖像處理
2025-08-25 -

安徽應急救援AI智能高效處理
2025-08-25 -
云南倉儲視頻壓縮與傳輸山區
2025-08-25 -
天津電力應急目標檢測
2025-08-25 -

比較好的目標跟蹤批發商
2025-08-25 -
四川省時省力目標檢測
2025-08-25