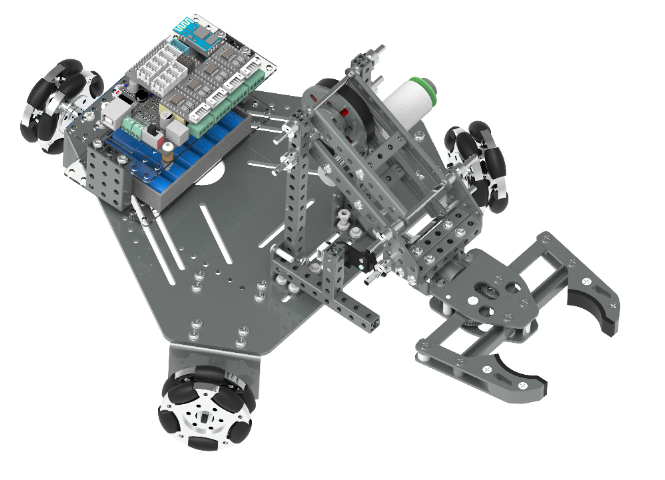
格物斯坦與上海大學、清華大學共建“清華-上大機器藝術與具身智能實驗室”,由上海大學副教授葉林奇領銜,聚焦具身智能、機器人運動控制與仿真技術的前沿研究。該實驗室開發的“格物”具身智能仿真平臺成為標志性成果——通過集成通用強化學習框架與模型自動化適配技術,實現“一套代碼適配百余款機器人”,新機型導入即可訓練,無需重復編程,徹底顛覆傳統研發流程。復旦大學亦深度參與技術驗證,其自主研制的“光華一號”人形機器人依托該平臺優化運動算法,將行走、抓取等功能的開發周期從3個月壓縮至數天。此外,平臺與UnityRLPlayground開源框架的融合,進一步降低了開發門檻,支持從仿真訓練到實體部署的全流程自動化。GC-500控制器開源設計,兼容ROS生態調用運動控制API。適合中齡段學習的開源程序
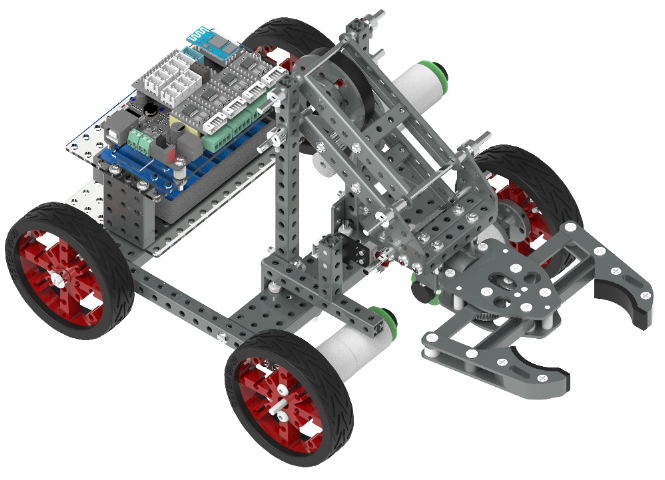
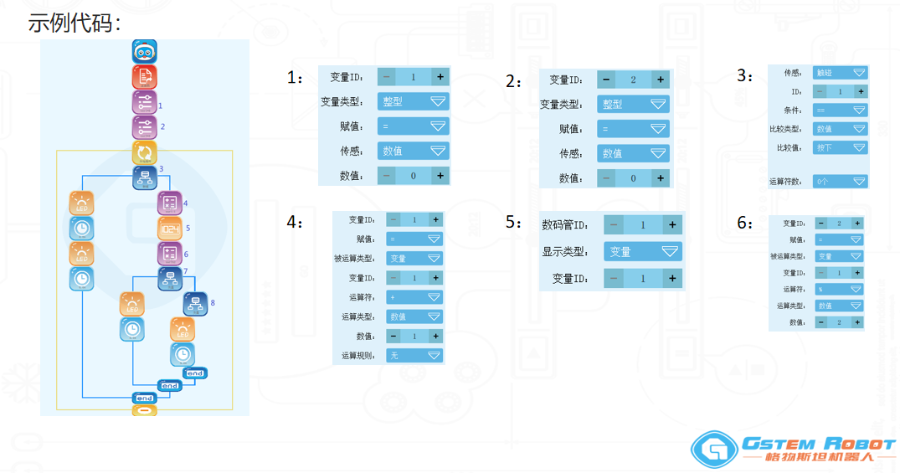
格物斯坦開源系列的機械手臂的軟件生態覆蓋從圖形化編程到工業級開發的完整路徑:低門檻開發:通過GScratch軟件(基于Scratch 2.0優化)拖拽“舵機角度”“視覺識別”等積木塊,學生可快速實現基礎動作控制;軟件支持一鍵將圖形代碼轉譯為Arduino C語言,降低高階開發的學習曲線。高階智能融合:結合ROS框架,機械手臂可運行多模態AI任務。例如集成YOLO目標檢測模型實現動態分揀(如物流包裹分類),或通過強化學習算法優化抓取路徑,在工業分揀場景中達到毫米級操作精度。仿真與現實協同:依托“格物”具身智能仿真平臺,學生可先在虛擬環境中預演機械臂運動策略(如抗擾控制、負載優化),再部署至實體硬件驗證。例如在模擬八級強風環境中測試動態平衡,或驗證50公斤負重下的結構穩定性,大幅壓縮研發周期。普及編程開源創客機器人課程圖形化編程卡將抽象代碼轉化為可觸摸指令,具象化學習邏輯鏈。
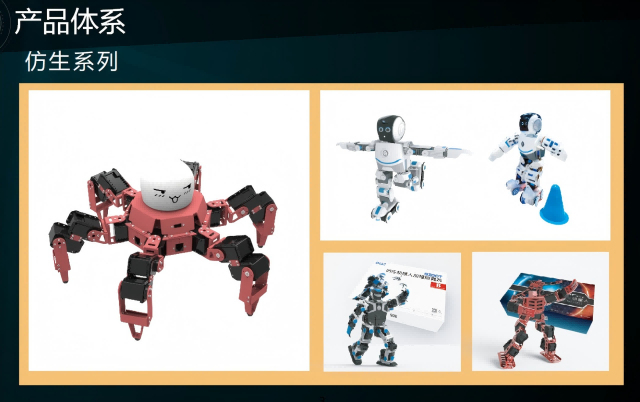
格物斯坦機械手臂的**價值在于打通“學習-創造-應用”閉環:教學場景:在K12階段,學生通過搭建機械臂模型學習齒輪傳動、杠桿原理等工程知識;高中生則開發“智能分揀系統”,結合OpenCV識別不同顏色與形狀的物體。在高校科研中,上海大學與清華大學聯合實驗室利用該平臺研究具身智能算法,例如優化雙足機器人Tinker的關節控制策略。競賽與社會議題:機械手臂成為解決真實問題的工具。如山區學生設計“智能澆花系統”,通過土壤濕度傳感器觸發機械臂灌溉指令;IRM大賽獲獎項目“林火監測無人機”則整合紅外傳感器與機械臂,實現火源定位誤差小于2米。產業賦能:平臺的開源特性降低企業研發成本。傳統需500萬元投入的機械臂原型開發,現可單人5天內完成;優必選、宇樹科技等企業基于其硬件架構開發出教育與工業場景產品,例如9.9萬元級家用服務機器人已投入養老醫療領域。
格物斯坦的開源系列產品,是其教育機器人生態中面向高齡學習者和創客群體的技術高地,它跳出了傳統教育機器人封閉系統的桎梏,以開放架構、模塊兼容、工業級延展為主要特色,將機器人教育從“玩具級操作”升級為“工業級創造”,為青少年架設了一座從學習通往真實技術世界的橋梁。格物斯坦開源系列的本質,是將工業級的開放生態注入教育場景,讓學習者在鋁合金的冷光與代碼的熱流之間,親歷從零件到系統、從用戶到開發者的蛻變。當少年們用開源模塊組裝出巡邏機械犬,或為仿生臂編寫抓取算法時,他們手中的不再是玩具,而是改變世界的鑰匙。??“創造無圍墻”——開源精神點燃每個人的創新力??。
格物斯坦這套開源課程的優勢在于 “產學研賽一體化”生態:工具鏈貫通:從圖形化編程(GScratch)到工業級開發(ROS/Arduino),學生可在“格物”仿真平臺預演算法(如抗強風機械臂運動策略),再部署至實體硬件驗證,壓縮研發周期;場景化創新:課程嵌入真實社會議題,如山區學生開發“智能澆花系統”,通過土壤濕度傳感器觸發機械臂灌溉指令,或參與IRM國際機器人創客大賽,設計火源定位誤差小于2米的林火監測無人機;開源社區協作:OpenLoong平臺共享3D模型與代碼庫(如“全自動象棋機器人”方案),學生可復用成熟模塊聚焦功能優化,而企業如優必選、宇樹科技亦基于其硬件架構二次開發,將傳統需500萬元投入的機械臂原型壓縮至單人5天完成。創客教育開源范式:工業級精度支撐教育級容錯。難度適中的開源代碼
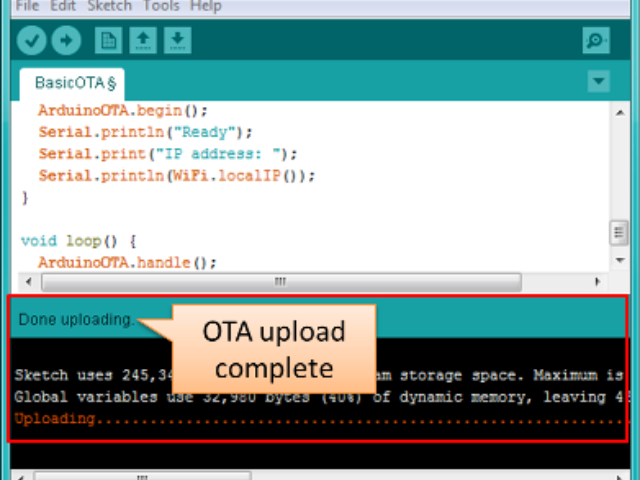
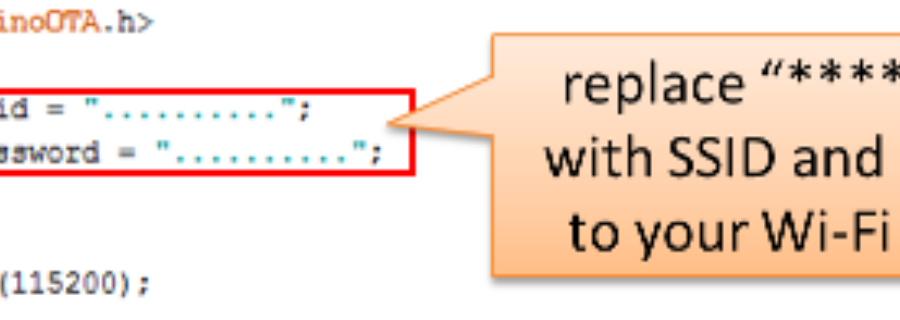
GScratch軟件繼承Scratch特性,新增硬件交互模塊,支持Arduino語言轉化。適合中齡段學習的開源程序
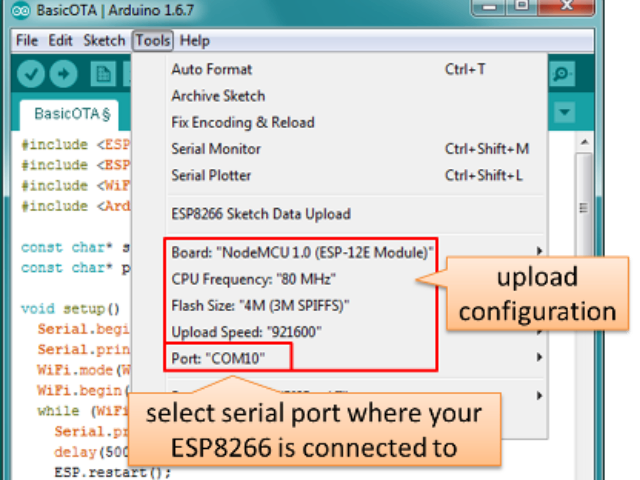
格物斯坦開源系列的控制器是其教育機器人生態的重要中樞,通過分層級、多模態的設計策略,精細適配3-16歲不同年齡段學習者的認知發展需求,同時以工業級性能與教育普惠性為**優勢,構建了從啟蒙交互到高階開發的完整技術鏈條。GC-500/GC-600高階控制器針對13-16歲青少年,不僅集成藍牙4.0模塊實現手機App遙控(如“你畫我跑”軌跡生成、語音指令交互),更深度兼容ROS(Robot Operating System)開發套件,提供傳感器驅動庫與運動控制API,支持Python/C++編寫自主導航算法,可直接部署至仿生機器人實體驗證。適合中齡段學習的開源程序