格物斯坦開源產品的深層意義,在于它將工業標準與教育目標深度融合。例如,在“家庭衛士”智能家居項目中,學生需配置紅外傳感器實現自動門開閉,調試電機扭矩確保門體平穩運行,并通過算法優化能耗——這一過程同時融貫了機械工程、電子工程與軟件工程的跨學科思維。而產品對ROS(Robot Operating System)等工業框架的兼容性,則讓學生提前接觸無人駕駛、多機協作等前沿場景,例如通過Gazebo模擬器測試機器人集群避障算法,再部署至實體機器人驗證。這種“虛實結合、學創一體” 的模式,不僅培養了技術能力,更塑造了“以開放工具解決復雜問題”的創造者心智。開源軟件讓全球開發者協作創新,打破技術壟斷??。全棧開放開源數據
格物斯坦自主研發的這套開源系列課程是其根據中國本土化stem教育生態中面向10歲以上青少年的更高階實踐平臺,深度融合工業級硬件與開源軟件生態,通過“機械結構+電子電路+算法編程”的三維整合,構建了從機械和編程的基礎認知到對其創新研發的完整路徑。該系列課程以高精度的金屬結構件(0.01毫米公差精度)與專門研發的開源控制器(如GC-500/GC-600)為很重要的載體,結合分層級編程工具鏈,精確適配不同年齡段學生的認知發展與創新能力需求。工具開源人形機器人仿生機械臂調用YOLO模型識別物體,抓取精度達工業級標準。
開源系列產品的跨學科整合:結合3D打印課程,定制非標結構件(如輕量化仿生腿),優化機器人動態性能;“腦電波控制積木車”實驗將專注力轉化為前進指令,應用于特殊教育場景。高等教育與科研仿生機器人開發:高校團隊基于“格物”仿真平臺預演雙足機器人Tinker的運動策略,再部署至實體硬件驗證抗風壓能力(模擬八級強風);通過調整關節參數(如腿長、偏轉角度),探索四足機器人Go2的極限負重(50公斤)與跳躍穩定性。人工智能融合:基于ROS開發“多機協作流水線”,實現機器人群體任務分配與避障算法;集成YOLO目標檢測模型,賦予機械臂動態抓取能力(如分揀快遞包裹)。
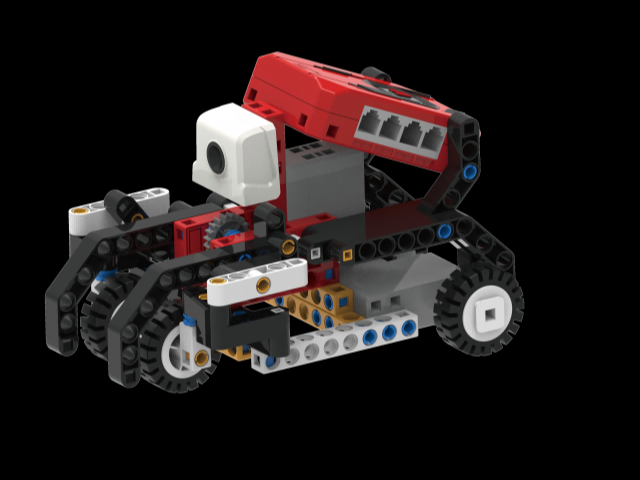
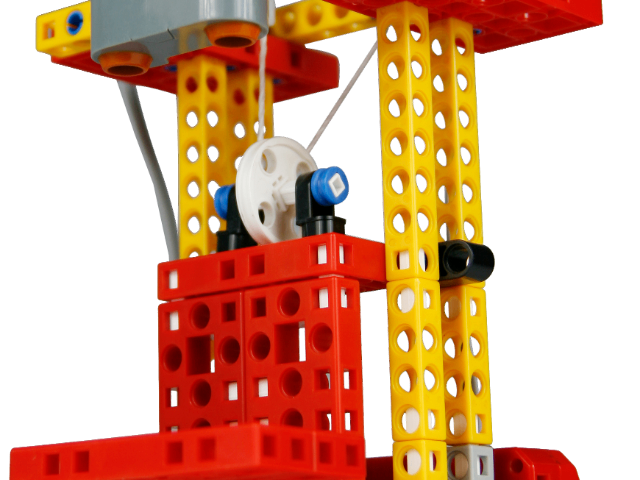
在開源課程中,學生需熟練運用螺絲刀、套筒等工具組裝鋁合金構件,學習曲柄連桿機構、蝸桿傳動、齒輪齒條等機械原理,并應用于實際模型搭建。例如,在“智能伸縮門”項目中,學生需設計限位開關與齒輪傳動系統,實現機械結構的精確啟停控制;在“塔吊”模型中,則需結合定滑輪與動滑輪原理優化負載平衡,理解工程力學在現實場景中的應用。課程要求學生掌握基礎電路原理,通過Arduino控制器驅動巡線傳感器、超聲波模塊、藍牙通信單元等300余種電子元件。例如,在“懸崖勒馬”項目中,學生需配置紅外傳感器探測邊緣距離,并編寫程序觸發舵機急停;在“循跡小車”任務中,則需調試灰度傳感器實現厘米級路徑跟蹤,綜合運用多傳感器數據融合技術解決動態環境下的導航問題。在線編程社區支持作品分享,激發跨地域協作創新。
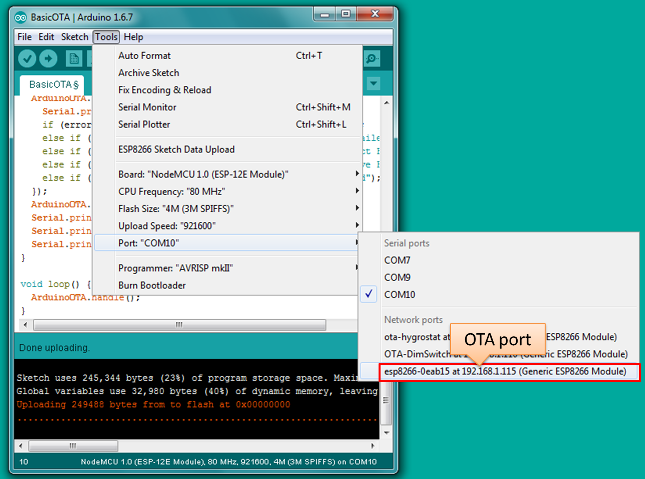
格物斯坦開源系列的機械手臂的軟件生態覆蓋從圖形化編程到工業級開發的完整路徑:低門檻開發:通過GScratch軟件(基于Scratch 2.0優化)拖拽“舵機角度”“視覺識別”等積木塊,學生可快速實現基礎動作控制;軟件支持一鍵將圖形代碼轉譯為Arduino C語言,降低高階開發的學習曲線。高階智能融合:結合ROS框架,機械手臂可運行多模態AI任務。例如集成YOLO目標檢測模型實現動態分揀(如物流包裹分類),或通過強化學習算法優化抓取路徑,在工業分揀場景中達到毫米級操作精度。仿真與現實協同:依托“格物”具身智能仿真平臺,學生可先在虛擬環境中預演機械臂運動策略(如抗擾控制、負載優化),再部署至實體硬件驗證。例如在模擬八級強風環境中測試動態平衡,或驗證50公斤負重下的結構穩定性,大幅壓縮研發周期。中學生開發仿生蜘蛛,協調12自由度舵機運動并優化動態平衡算法。工具開源人形機器人
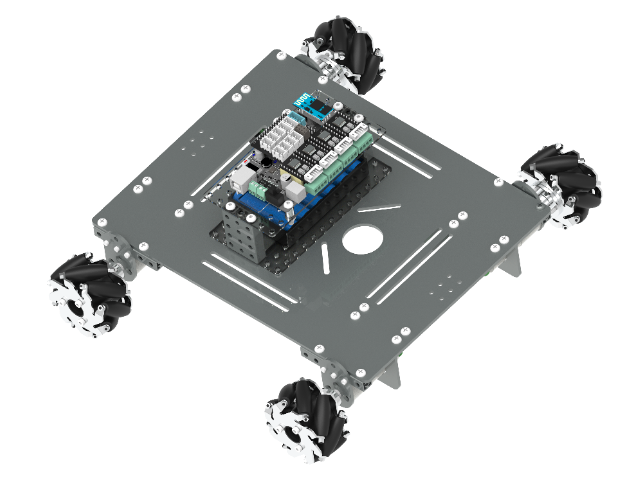
開源柔性制造流水線教案,模擬工業4.0生產流程。全棧開放開源數據
這些控制器與格物斯坦的 “產學研賽一體化”戰略深度融合——GC-500已應用于IRM國際機器人創客大賽,支撐青少年開發出火源定位誤差小于2米的“災區生命探測機器人”;高校團隊則依托GC-600的ROS兼容性,在“格物”仿真平臺中預演雙足機器人抗八級強風的運動策略,再將算法部署至實體硬件驗證,大幅壓縮研發周期。從幼兒指尖的點讀筆到青少年手中的ROS開發板,格物斯坦以一套梯度化、開源化、工業化的控制器體系,讓每個年齡段的創造者都能找到技術支點,在真實問題解決中錘煉從邏輯思維到系統工程的素養。全棧開放開源數據