在夜間視野較差時,激光雷達(dá)依舊是更佳的解決方案。夜間場景下,攝像頭與人眼只能依賴車輛燈光和周圍環(huán)境光,但是這會有很多視覺盲區(qū)。而激光雷達(dá)則能讓這個問題迎刃而解,即便在昏暗環(huán)境下,也能提供豐富的感知信息。雖然激光雷達(dá)優(yōu)勢眾多,但也并不是全能的,譬如雨霧等極端環(huán)境下的穿透效果始終不及毫米波雷達(dá)。我們要清...
激光雷達(dá)基本參數(shù)
- 品牌
- 慧視科技
- 型號
- 可定制
激光雷達(dá)企業(yè)商機(jī)
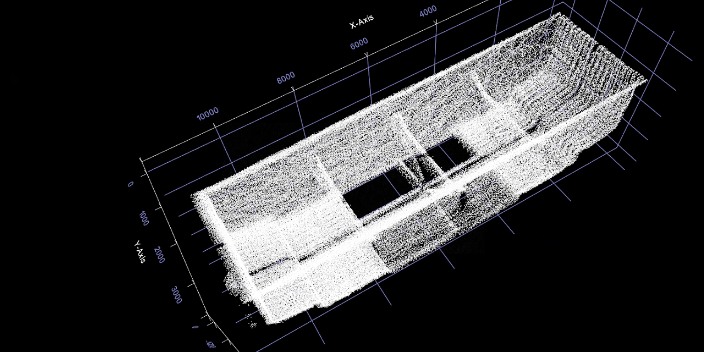
相比圖像處理,激光雷達(dá)是一種比較原始的控制方式,其原理和家里的掃地機(jī)是一樣的,就是根據(jù)周邊的障礙物和地圖控制車輛行駛方向和速度。激光雷達(dá)可每秒向外發(fā)射幾百萬個激光脈沖并通過內(nèi)部旋轉(zhuǎn)方式對外界進(jìn)行旋轉(zhuǎn)掃描。每次掃描都可獲取周邊物體精確的三維數(shù)據(jù)。將收集的數(shù)據(jù)上傳并分析處理,然后得出結(jié)果。這種方法的缺點(diǎn)就是算法是固的,完全依賴硬件性能,不能通過自我學(xué)習(xí)提升,不能識別紅綠燈和限速牌,無法實(shí)現(xiàn)更高級別的自動駕駛。這種應(yīng)該叫輔助駕駛,并不是真正意義上的自動駕駛。其特點(diǎn)是激光輸出波長范圍較寬;氣體的光學(xué)均勻性較好。四川三維激光雷達(dá)成像

在自動駕駛的早期研發(fā)階段,傳感器的標(biāo)定還未形成高效的模式,主要的幾種標(biāo)定方式有輪廓對齊、環(huán)境重建等方式,但這些方式不是準(zhǔn)確性不理想,就是對環(huán)境的要求過高,有的需要在戶外進(jìn)行長時間的實(shí)驗(yàn),標(biāo)定效率低。隨著自動駕駛進(jìn)入量產(chǎn)階段,這類標(biāo)定方法將不再適用,業(yè)內(nèi)需要的是高效、準(zhǔn)確的標(biāo)定模式——標(biāo)定車間。標(biāo)定車間是一個高度定制化的場地,主要由標(biāo)定標(biāo)志物、標(biāo)定平臺、照明設(shè)備組成。標(biāo)定標(biāo)志物目前主要指標(biāo)定板,包括棋盤格標(biāo)定板、ArUco標(biāo)定板、圓形網(wǎng)格標(biāo)定板、ChArUco標(biāo)定板等。企業(yè)可根據(jù)采用的算法選擇不同類型的標(biāo)定板,有些企業(yè)也采用屏幕顯示標(biāo)定板的方式進(jìn)行標(biāo)定。tof激光雷達(dá)成像抗干擾能力強(qiáng),隱蔽性好;激光不受無線電波干擾,能穿越等離子鞘。

服務(wù)型機(jī)器人、智慧城市及測繪是激光雷達(dá)的典型應(yīng)用場景,對激光雷達(dá)性能有 不同要求。例如應(yīng)用于工業(yè)領(lǐng)域的 YDLIDAR 激光雷達(dá)測距遠(yuǎn)為 30 米,應(yīng)用 于測繪等領(lǐng)域的華測導(dǎo)航激光雷達(dá)遠(yuǎn)測程可達(dá) 1350 米。政策支持機(jī)器人行業(yè)發(fā)展,移動機(jī)器人有望受益。借助強(qiáng)大的內(nèi)置感知系統(tǒng)及控 制系統(tǒng),移動機(jī)器人能夠完成多種無人作業(yè),從而減輕對人力的依賴,提高生產(chǎn) 效率。為推進(jìn)我國機(jī)器人產(chǎn)業(yè)發(fā)展,有關(guān)部門相繼制定發(fā)布了一系列政策,例如 2021 年 12 月,工信部等部門發(fā)布《“十四五”機(jī)器人產(chǎn)業(yè)發(fā)展規(guī)劃》,爭取 2025 年我國成為全球機(jī)器人技術(shù)創(chuàng)新策源地、制造集聚地和集成應(yīng)用新高地, 2035 年我國機(jī)器人產(chǎn)業(yè)綜合實(shí)力達(dá)到國際**水平。
激光雷達(dá)產(chǎn)業(yè)鏈上游主要為激光器、探測器、掃描器和光學(xué)芯片等組件,中游市 場按照所生產(chǎn)激光雷達(dá)在掃描系統(tǒng)所使用不同技術(shù)路線可分為機(jī)械式激光雷達(dá)、 MEMS 激光雷達(dá)、Flash 激光雷達(dá)和 OPA 激光雷達(dá)等,下游應(yīng)用市場主要分為 智能駕駛、服務(wù)型機(jī)器人和測繪等領(lǐng)域。根據(jù)測算,預(yù)計我國乘用車領(lǐng)域激光雷達(dá)市場空間在2025年將達(dá)到261億元,到2030年將達(dá)到980億元;乘用車領(lǐng)域激光雷達(dá)市場規(guī)模未來3年復(fù)合增速能達(dá)到200%+,2025年至2030年復(fù)合增速達(dá)到30%以上。機(jī)載雷達(dá)系統(tǒng)的組成包括:激光掃描器、高精度慣性導(dǎo)航儀、應(yīng)用查分技術(shù)的全球定位系統(tǒng)、高分辨率數(shù)碼相機(jī)。

激光雷達(dá)是一種以激光作為載波探測目標(biāo)位置的電子設(shè)備。激光雷達(dá)由發(fā)射模塊、接收模塊和信號處理模塊三部分組成。激光雷達(dá)測距的基本原理是激光信號由發(fā)射模塊發(fā)送出去,經(jīng)過光學(xué)系統(tǒng)到達(dá)目標(biāo)物,接收模塊接收來自目標(biāo)物的反射激光回波信號,在信號處理模塊,回波經(jīng)過處理進(jìn)入到檢測系統(tǒng),然后獲得目標(biāo)物的距離信息。即其中,L是目標(biāo)物的待測距離值,c是空氣中的光速,t是發(fā)射接收往返期間時間值。在平面上確定坐標(biāo)原點(diǎn)建立極坐標(biāo)系,那么定位平面上任意一點(diǎn) M 的位置,需要知道 M 的坐標(biāo)(r,θ),即 M 點(diǎn)到原點(diǎn)的距離以及與坐標(biāo)軸的方位角,這樣通過得到 M 點(diǎn)相對坐標(biāo)系原點(diǎn)的位置信息而達(dá)到對 M 點(diǎn)的定位。半導(dǎo)體激光器的激勵方式主要有電注入式、光泵式和高能電子束激勵式。三位測繪激光雷達(dá)應(yīng)用
激光雷達(dá)可應(yīng)用于油氣直接勘察。四川三維激光雷達(dá)成像
激光雷達(dá)在測繪領(lǐng)域有重要作用,例如我國西部地區(qū)多山,地勢高低起伏,很多地方又典型的喀斯特地貌,公路計劃區(qū)域常為帶狀沿山谷分布,地形復(fù)雜、植被茂密,兩側(cè)多高山峽谷,垂直落差較大。對于無人機(jī)航飛和后續(xù)的數(shù)據(jù)處理來說是一個巨大的挑戰(zhàn)。成都慧視的HSLi-H20系列三維激光雷達(dá),具有探測范圍寬、分辨率高、響應(yīng)速度快、點(diǎn)云密集、環(huán)境耐受性高等杰出優(yōu)點(diǎn),擺脫了現(xiàn)有市場上探測分辨率、掃描速度等技術(shù)參數(shù)不滿足實(shí)際需求指標(biāo)、性價比不高等現(xiàn)實(shí)性問題,非常適用于野外場景的監(jiān)控和測量。可以在地形復(fù)雜的山區(qū)進(jìn)行公路地理信息的測繪。四川三維激光雷達(dá)成像
成都慧視光電技術(shù)有限公司在電子元器件,光電子器件,通訊設(shè)備,儀器儀表一直在同行業(yè)中處于較強(qiáng)地位,無論是產(chǎn)品還是服務(wù),其高水平的能力始終貫穿于其中。公司成立于2019-08-26,旗下慧視科技,已經(jīng)具有一定的業(yè)內(nèi)水平。慧視光電致力于構(gòu)建通信產(chǎn)品自主創(chuàng)新的競爭力,產(chǎn)品已銷往多個國家和地區(qū),被國內(nèi)外眾多企業(yè)和客戶所認(rèn)可。
與激光雷達(dá)相關(guān)的文章

成都固態(tài)面陣激光雷達(dá)應(yīng)用
- 車路協(xié)同激光雷達(dá)的應(yīng)用 2024-04-18
- agv激光雷達(dá)測繪 2024-04-17
- 成都2D激光雷達(dá)數(shù)據(jù)處理 2024-04-14
- 西藏三維激光雷達(dá)技術(shù) 2024-04-14
- 云南自動駕駛激光雷達(dá)避障 2024-04-13
- 成都車用激光雷達(dá)系統(tǒng) 2024-04-13
- 西藏ibeo激光雷達(dá)測量 2024-04-11
- 重慶軌道檢測激光雷達(dá) 2024-04-10
- 重慶mems激光雷達(dá)系統(tǒng) 2024-04-10
- 貴陽車路協(xié)同激光雷達(dá)測距原理 2024-04-09
- 四川大氣激光雷達(dá)測繪 2024-04-09
- 成都905nm激光雷達(dá)推薦 2024-04-09
與激光雷達(dá)相關(guān)的產(chǎn)品



與激光雷達(dá)相關(guān)的新聞
-
貴州軌道交通激光雷達(dá) 2024-04-07 00:12:16在安防領(lǐng)域,激光雷達(dá)能夠?qū)崿F(xiàn)目標(biāo)區(qū)域的異物入侵監(jiān)測。例如在火車站站臺,需要乘客遠(yuǎn)離軌道1米以上,但是許多乘客容易疏忽大意,就容易出現(xiàn)危險,將激光雷達(dá)安裝在車站月臺,就能夠輔助進(jìn)行安全距離的報警監(jiān)測。在智慧停車領(lǐng)域,激光雷達(dá)能夠輔助進(jìn)行停車,檢測車輛移動狀態(tài),控制車輛與物體之間的距離。在建模領(lǐng)域,激光...
-
重慶16線激光雷達(dá)廠家 2024-04-07 02:02:12我國的鐵路基礎(chǔ)設(shè)施建設(shè)已實(shí)現(xiàn)了跨越式發(fā)展,目前我國鐵路總里程在全球已位居世界前列,鐵路運(yùn)輸在國民經(jīng)濟(jì)發(fā)展中發(fā)揮著越來越重要的作用。隨著中國鐵路的繼續(xù)發(fā)展,鐵路軌道安全保障已成為鐵路技術(shù)發(fā)展中亟待解決的問題。其中,鐵路軌道表面異物的檢測是安全保障的重要前提,所以首先要解決鐵路軌道表面異物安全檢測的難題...
-
sick激光雷達(dá)推薦 2024-04-05 00:13:30在物體測量領(lǐng)域,激光雷達(dá)能夠通過掃描獲取物體的三維信息,從而計算出體積、重量等數(shù)據(jù)。在大多數(shù)高速入口,都會對進(jìn)入高速的貨車等進(jìn)行稱重,此時,激光雷達(dá)就有大用場,將激光雷達(dá)植入車輛檢測系統(tǒng),就能夠?qū)M(jìn)入的車輛進(jìn)行計數(shù)和安全檢測,可以實(shí)時檢測來往車輛的長寬高,并且能夠根據(jù)算法計算出體積、重量,一旦車輛有...
-
成都905nm激光雷達(dá)導(dǎo)航 2024-04-04 10:01:57激光雷達(dá)空間探測分辨率高、探測精度高、探測范圍廣的優(yōu)點(diǎn),可以有效應(yīng)用于大氣環(huán)境探測。利用激光雷達(dá)可以探測氣溶膠、云粒子的分布、大氣成分和風(fēng)場的垂直廓線,還可以對主要污染源可以進(jìn)行有效監(jiān)控。激光雷達(dá)發(fā)出的激光可以與空氣中漂浮粒子發(fā)生作用進(jìn)而產(chǎn)生散射,并且漂浮粒子的尺度和入射光波長與為同一數(shù)量級,散射系...
與激光雷達(dá)相關(guān)的問題
與激光雷達(dá)相關(guān)的標(biāo)簽
新聞資訊
產(chǎn)品推薦
-

內(nèi)蒙古目標(biāo)檢測經(jīng)驗(yàn)豐富
2025-08-27 -
吉林視頻目標(biāo)檢測
2025-08-27 -

低壓線目標(biāo)跟蹤互惠互利
2025-08-26 -

湖北如何目標(biāo)跟蹤
2025-08-26 -
湖北實(shí)時目標(biāo)檢測
2025-08-26 -

云南專業(yè)圖像標(biāo)注應(yīng)用
2025-08-26 -

無源目標(biāo)跟蹤售后服務(wù)
2025-08-26 -
貴州銀行視頻壓縮與傳輸提供商
2025-08-26 -

河北目標(biāo)檢測多少錢
2025-08-26