
多邊形標注能夠能夠幫助我們標注一些規(guī)則復(fù)雜的物體,如動物、人、車、建筑物等,與矩形標注框等方法相比,多邊形標注更能精確展示被標注物體的形狀、大小以及實時形態(tài),通過大量的多邊形標注工作,能夠更好的幫助我們提高算法模型的準確性和魯棒性。傳統(tǒng)的多邊形標注方法中,標注者需要在物體的邊緣上依次單擊鼠標或使用繪...
目標跟蹤基本參數(shù)
- 品牌
- 慧視科技
- 型號
- 可咨詢
- 輸出信號
- 數(shù)字型,定制
- 制作工藝
- 集成,薄膜,陶瓷,可定制
- 材質(zhì)
- 可定制
- 材料物理性質(zhì)
- 導(dǎo)體,磁性材料,定制
- 材料晶體結(jié)構(gòu)
- 定制
- 加工定制
- 是
目標跟蹤企業(yè)商機
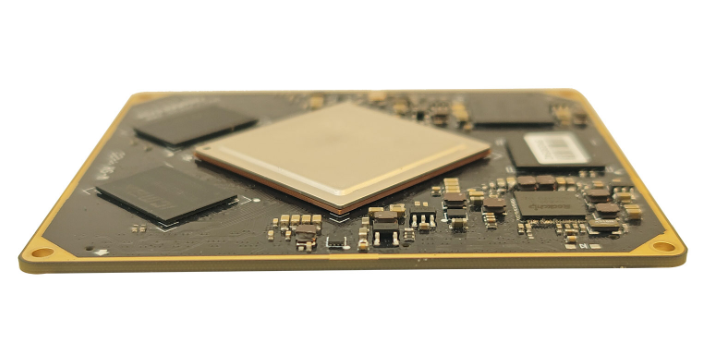
對于目標被暫時遮擋的情況,通過設(shè)定目標狀態(tài)為暫時丟失狀態(tài),并以上一次目標的位置和速度繼續(xù)對后續(xù)的目標位置進行預(yù)測,在后續(xù)圖像中可以再次重新找回目標。在攝像機控制時,采取估計提前量的控制策略也對跟蹤有很大的幫助。控制攝像機,使目標提前擺到視野中目標運動方向的另一側(cè),可以為以后的跟蹤贏得更多的跟蹤時間和機會。在本實驗序列中尤為明顯,目標基本上保持由左上向右下運動的趨勢,根據(jù)對目標速度的估計,則攝像機提前將目標定為視野中心偏上偏左的區(qū)域,對目標運動加提前估計量。工程師以RK3399核心板為基礎(chǔ)進行定制開發(fā),讓攝像頭更加智能高效,能夠輸出高清流的圖像視頻。四川目標跟蹤聯(lián)系方式
目標跟蹤
然后在下一幀采集的圖像中對目標對象進行特征提取;特征匹配的過程既是將提取出來的目標對象的特征與我們事先已經(jīng)建立的特征模板進行匹配,通過與特征模板的相似程度來確定被跟蹤的目標對象,實現(xiàn)對目標的跟蹤。基于特征的跟蹤算法的優(yōu)點在于速度快、對運動目標的尺度、形變和亮度等變化不敏感,能滿足特定場合的處理要求。但由于特征具有稀疏性和不規(guī)則性,所以該算法對于噪聲、遮擋、圖像模糊等比較敏感,如果目標發(fā)生旋轉(zhuǎn),則部分特征點會消失,新的特征點會出現(xiàn),因此需要對匹配模板進行更新。安徽目標跟蹤型號振動測試是否通過正是確定板卡能否在這樣的環(huán)境下正常完成工作的關(guān)鍵手段。

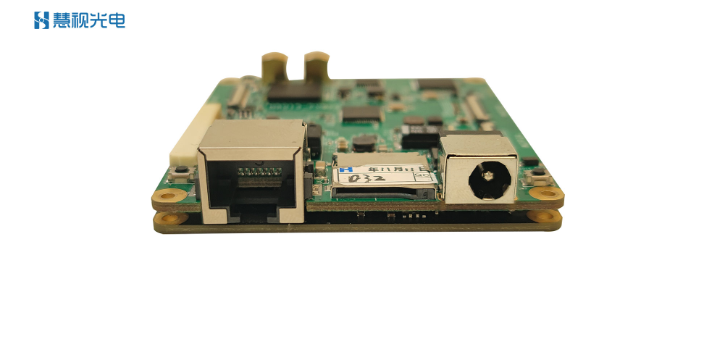
目前,采用圖像識別技術(shù)來實現(xiàn)無人機規(guī)避其他障礙物是一個有效的方法。通過在無人機上植入圖像識別模塊,這個模塊由圖像處理板和相機組合而成,通過算法的賦能,就能針對不同物體實現(xiàn)快速AI識別,然后實現(xiàn)規(guī)避。而在圖像處理板的選擇上,成都慧視開發(fā)的Viztra-LE026圖像處理板就十分合適。這塊板卡采用了RV1126開發(fā)設(shè)計而成,外形呈圓形,體積小巧,尺寸為Ф38mm*12mm,重量只有12g,用在無人機上不會過多占用空間。此外,該板卡功耗≤4W,也不會增加無人機的續(xù)航負擔。
目標檢測與目標跟蹤這兩個任務(wù)有著密切的聯(lián)系。針對目標跟蹤任務(wù),微軟亞洲研究院提出了一種通過目標檢測技術(shù)來解決的新視角,采用簡潔、統(tǒng)一而高效的“目標檢測+小樣本學(xué)習(xí)”框架,在多個主流數(shù)據(jù)集上均取得了杰出性能。目標跟蹤(Object tracking)與目標檢測(Object detection)是計算機視覺中兩個經(jīng)典的基礎(chǔ)任務(wù)。跟蹤任務(wù)需要由用戶指定跟蹤目標,然后在視頻的每一幀中給出該目標所在的位置,通常由一系列的矩形邊界框表示。而檢測任務(wù)旨在定位圖片中某幾類物體的坐標位置。對物體的檢測、識別和跟蹤能夠有效地幫助機器理解圖片視頻的內(nèi)容,為后續(xù)的進一步分析打下基礎(chǔ)。無人機可能會受到敵方勢力或者強風(fēng)等因素干擾,造成不同幅度的振動,從而影響板卡能否正常完成任務(wù)。

無人機追逐識別可以用在許多領(lǐng)域,如軍備、安防。通過專業(yè)傳感器設(shè)備的植入,讓攝像頭智能化,就可以對無人機進行追蹤識別。成都慧視作為一家深耕圖像處理領(lǐng)域的企業(yè),在這方面也有著豐富的解決經(jīng)驗。在硬件領(lǐng)域,我們能夠定制開發(fā)不同接口的圖像處理板,如CVBS、SDI、LVDS、DVP、USB、Cameralink等,只要您提出需求,我們就能通過應(yīng)用場景需要定制合適的接口。這是進行無人機識別的基礎(chǔ)條件。目前,成都慧視能夠提供不同等級算力的圖像處理板,RV1126、RK3399Pro、RK3588等系列,滿足多場景、廣領(lǐng)域。工程師以RV1126核心板為基礎(chǔ)進行定制開發(fā),讓攝像頭更加智能高效,能夠輸出高清流的圖像視頻。四川目標跟蹤聯(lián)系方式
慧視AI圖像處理板是高精度識別的板卡。四川目標跟蹤聯(lián)系方式
成都慧視開發(fā)Viztra-HE030圖像處理板就十分合適,工業(yè)級芯片RK3588的加持下,至高輸出6.0TOPS的算力,足以滿足工業(yè)檢測需求。而像背景稍微簡單的地面人、車,湖面船舶的檢測,如果不是特殊需求,選擇性能適中的Viztra-ME025圖像處理板就能夠滿足需求。板卡采用國內(nèi)智能AI芯片RK3399Pro,基于雙Cortex-A72+四Cortex-A53大小核CPU結(jié)構(gòu);CPU主頻1.8GHz;能夠輸出3.0TOPS的算力,在我司高精尖目標識別算法的賦能下,就能夠?qū)崿F(xiàn)人車船的檢測識別。四川目標跟蹤聯(lián)系方式
與目標跟蹤相關(guān)的文章

湖北目標跟蹤優(yōu)勢
- 四川目標跟蹤聯(lián)系方式 2025-08-28
- 貴州數(shù)據(jù)目標跟蹤 2025-08-28
- 湖南信息化目標跟蹤 2025-08-27
- 山東工業(yè)目標跟蹤 2025-08-27
- 湖南目標跟蹤批發(fā)價格 2025-08-27
- 靠譜的目標跟蹤有什么 2025-08-27
- 低壓線目標跟蹤互惠互利 2025-08-26
- 湖北如何目標跟蹤 2025-08-26
- 無源目標跟蹤售后服務(wù) 2025-08-26
- 青海目標跟蹤設(shè)備 2025-08-26
- 移動目標跟蹤解決 2025-08-26
- 什么目標跟蹤參考價格 2025-08-26
與目標跟蹤相關(guān)的產(chǎn)品


與目標跟蹤相關(guān)的新聞
-
比較好的目標跟蹤批發(fā)商 2025-08-25 05:03:23目標識別算法是一種深度學(xué)習(xí)算法,其聰明程度需要我們不斷訓(xùn)練,這就得益于大量的圖像標注,通過對車輛行駛環(huán)境的數(shù)據(jù)集的大量標注,能夠讓AI更加聰明,標注得越多,識別的精度就可能越高。但是大量的圖像標注跟工作顯然會耗費大量的時間精力。而慧視SpeedDP的出現(xiàn)很好地解決了這個問題。SpeedDP是一個深度...
-
比較好的目標跟蹤報價行情 2025-08-25 03:03:16首先攝像機采用的是可見光高清攝像機,具備1920*1080的分辨率,系統(tǒng)視場31.11°×17.8°,其中搜索視場15.8°×15.8°(1080P像素)。而圖像處理則采用慧視開發(fā)的RV1126高性能圖像處理板,之所以采用這塊板卡,一方面得益于其低功耗、微型外觀的設(shè)計,非常契合“智慧眼”這樣對于空間...
-
陜西目標跟蹤有哪些 2025-08-25 03:03:15目標檢測和跟蹤是計算機視覺領(lǐng)域中的重要任務(wù)之一。隨著深度學(xué)習(xí)的興起,YOLO(You Only Look Once)算法在目標檢測和跟蹤領(lǐng)域引起了廣關(guān)注。YOLO算法是一種在實時目標檢測和跟蹤領(lǐng)域具有重要地位的算法。通過引入卷積神經(jīng)網(wǎng)絡(luò)和一系列先進技術(shù),YOLO算法在速度和準確性方面取得了明顯的進展...
-
無線目標跟蹤多少錢 2025-08-24 03:06:30“啟明935A”系列芯片已經(jīng)成功點亮,并完成各項功能性測試,達到車規(guī)級量產(chǎn)標準。啟明935A是行業(yè)首顆基于Chiplet(芯粒/小芯片)異構(gòu)集成范式的自動駕駛芯片,但并非單一芯片,而是一個家族系列。啟明935HUBChiplet可以和不同數(shù)量的大熊星座AIChiplet互相搭配,再結(jié)合靈活的封裝方式...
與目標跟蹤相關(guān)的問題
新聞資訊
產(chǎn)品推薦
-
寧夏哪里有目標檢測要多少錢
2025-08-27 -
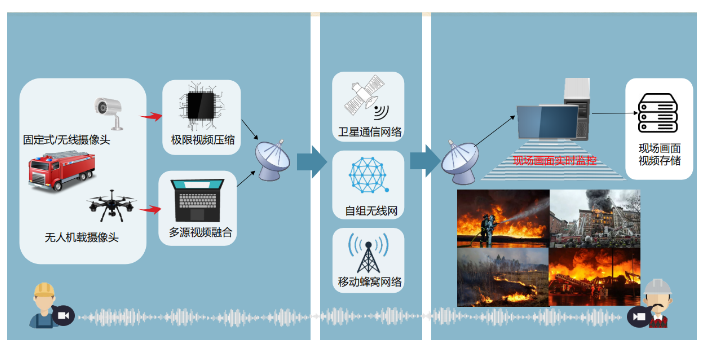
云南可視化視頻壓縮與傳輸解決方案
2025-08-27 -

湖南信息化目標跟蹤
2025-08-27 -

專業(yè)AI智能廠家
2025-08-27 -
浙江高效目標檢測
2025-08-27 -

陜西省時省力目標檢測要多少錢
2025-08-27 -

重慶智慧視覺AI智能算法分析
2025-08-27 -
湖北省時省力目標識別創(chuàng)意
2025-08-27 -

山東工業(yè)目標跟蹤
2025-08-27