多邊形標注能夠能夠幫助我們標注一些規(guī)則復雜的物體,如動物、人、車、建筑物等,與矩形標注框等方法相比,多邊形標注更能精確展示被標注物體的形狀、大小以及實時形態(tài),通過大量的多邊形標注工作,能夠更好的幫助我們提高算法模型的準確性和魯棒性。傳統(tǒng)的多邊形標注方法中,標注者需要在物體的邊緣上依次單擊鼠標或使用繪...
目標跟蹤基本參數(shù)
- 品牌
- 慧視科技
- 型號
- 可咨詢
- 輸出信號
- 數(shù)字型,定制
- 制作工藝
- 集成,薄膜,陶瓷,可定制
- 材質(zhì)
- 可定制
- 材料物理性質(zhì)
- 導體,磁性材料,定制
- 材料晶體結(jié)構(gòu)
- 定制
- 加工定制
- 是
目標跟蹤企業(yè)商機
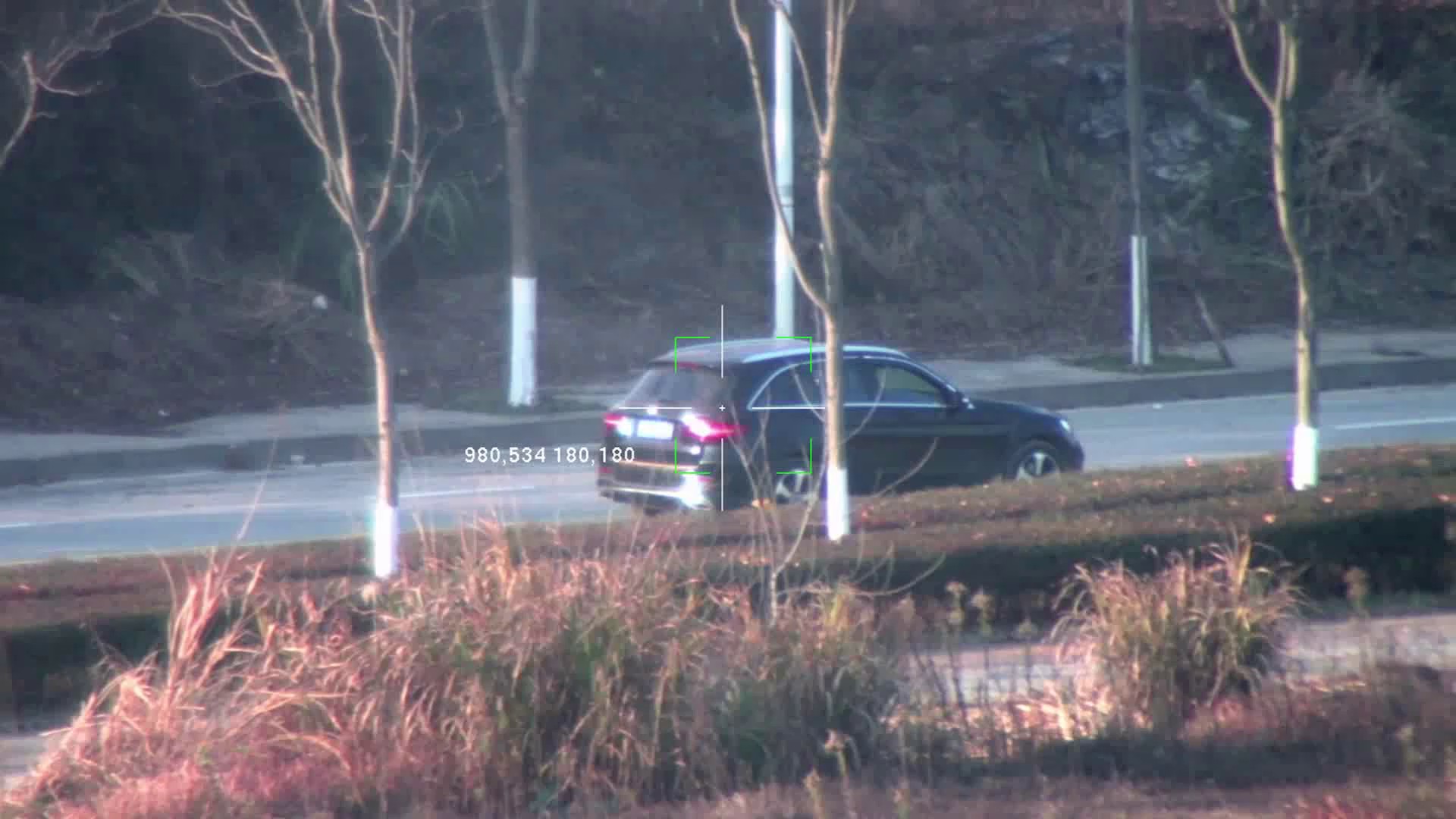
檢測器的輸出通常被用作跟蹤設(shè)備的輸入,跟蹤設(shè)備的輸出被提供給運動預測算法,該算法預測物體在接下來的幾秒鐘內(nèi)將移動到哪里。然而,在無檢測跟蹤中,情況并非如此。基于DFT的模型要求必須在首幀中手動初始化固定數(shù)量的對象,然后必須在隨后的幀中對這些對象進行定位。DFT是一項困難的任務,因為關(guān)于要跟蹤的對象的信息有限,而且這些信息不清楚。結(jié)果,初始邊界框與背景中的感興趣對象近似,并且對象的外觀可能隨著時間的推移而急劇改變。
智能化的圖像處理板還可以實現(xiàn)自動化的數(shù)據(jù)分析,實現(xiàn)降本增效。多系統(tǒng)適配目標跟蹤廠家電話目標跟蹤
目標檢測和跟蹤是計算機視覺領(lǐng)域中的重要任務之一。隨著深度學習的興起,YOLO(You Only Look Once)算法在目標檢測和跟蹤領(lǐng)域引起了廣關(guān)注。YOLO算法是一種在實時目標檢測和跟蹤領(lǐng)域具有重要地位的算法。通過引入卷積神經(jīng)網(wǎng)絡(luò)和一系列先進技術(shù),YOLO算法在速度和準確性方面取得了明顯的進展。然而,仍然有一些挑戰(zhàn)需要解決,如目標尺度變化、小目標檢測和復雜背景干擾等。隨著研究的不斷深入和技術(shù)的不斷發(fā)展,YOLO算法有望在實時目標檢測和跟蹤領(lǐng)域發(fā)揮更大的作用。黑龍江目標跟蹤參考價格AI圖像處理板能實現(xiàn)24小時、無間隙信息化監(jiān)控。

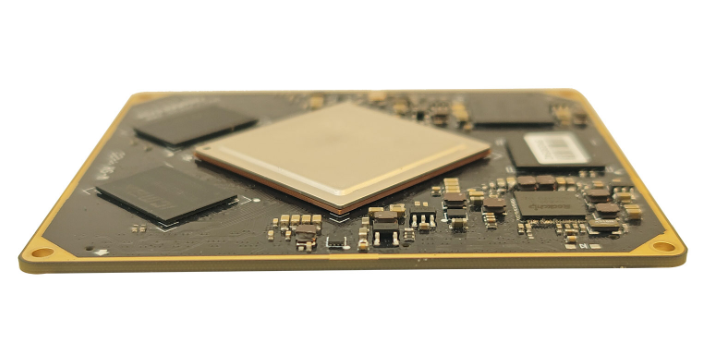
目標跟蹤時,多維度、多層級信息融合也十分重要。為了提高對運動目標表觀描述的準確度與可信性,現(xiàn)有的檢測與跟蹤算法通常對時域、空域、頻域等不同特征信息進行融合,綜合利用各種冗余、互補信息提升算法的精確性與魯棒性.然而,目前大多算法還只是對單一時間、單一空間的多尺度信息進行融合,使用者可以考慮從時間、推理等不同維度,對特征、決策等不同層級的多源互補信息進行融合,提升檢測與跟蹤的準確性。成都慧視開發(fā)的Viztra-HE030圖像處理板采用了RK3588高性能芯片,工業(yè)級的處理能力能夠運用到諸多行業(yè)。
YOLO算法的關(guān)鍵技術(shù)在YOLO算法中,有幾個關(guān)鍵技術(shù)對其性能起著重要作用。首先是使用卷積神經(jīng)網(wǎng)絡(luò)提取圖像特征,其中引入了一些先進的網(wǎng)絡(luò)結(jié)構(gòu),如Darknet。其次是使用AnchorBox來提高目標定位的精度。此外,YOLO算法還引入了特征金字塔網(wǎng)絡(luò)和多尺度預測等技術(shù),以處理不同大小的目標。YOLO算法在實時目標檢測和跟蹤中的應用YOLO算法在實時目標檢測和跟蹤領(lǐng)域取得了明顯的成果。它不僅在檢測速度上遠超傳統(tǒng)方法,而且在目標定位和類別預測準確性上也表現(xiàn)出色。因此,YOLO算法在許多應用中得到了廣泛應用,如視頻監(jiān)控、自動駕駛和物體識別等。RK3399圖像處理板是我司自主研發(fā)的目標跟蹤板,該板卡采用國產(chǎn)高性能CPU,搭載自研目標跟蹤及跟蹤算法。

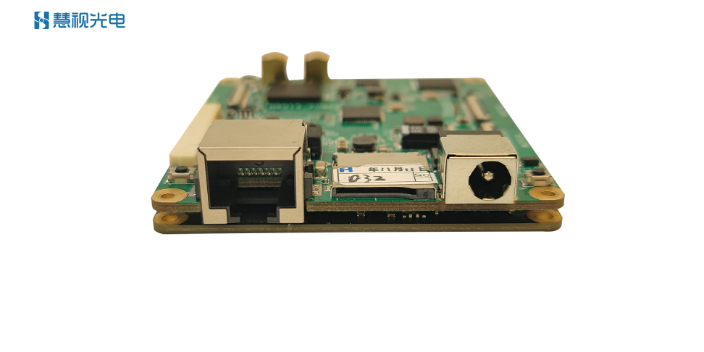
從軟件的角度來看,整個視頻跟蹤系統(tǒng)主要是由電視攝像機及控制、圖像獲取模塊、圖像顯示模塊、數(shù)據(jù)庫,運動檢測,目標跟蹤,報警輸入和人機接口模塊等組成的。視覺計算模塊是視頻跟蹤系統(tǒng)的重點,是實現(xiàn)目標檢測和跟蹤的關(guān)鍵,如圖3所示。一般采取先檢測后跟蹤(Detect-before-Track)方式,目標的檢測和跟蹤是緊密結(jié)合的。檢測是跟蹤的前因,并為跟蹤提供了目標的信息(如目標的位置,大小,模式和速度估計等),而跟蹤則是檢測的延續(xù),實時利用檢測得到的知識去驗證目標的存在。慧視RV1126圖像處理板能實現(xiàn)24小時、無間隙信息化監(jiān)控。貴州目標跟蹤生產(chǎn)企業(yè)
慧視微型雙光吊艙非常適用于無人機領(lǐng)域。多系統(tǒng)適配目標跟蹤廠家電話
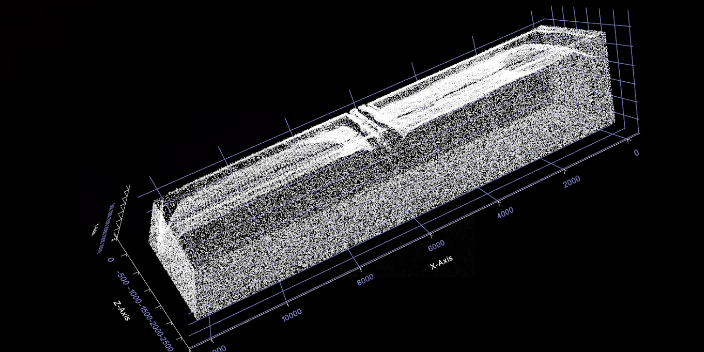
序列圖像的差異通常是運動目標檢測和跟蹤的出發(fā)點,認為目標的運動是圖像差異的根本原因。但是,這是建立在背景本身不運動的前提下的。因此,在許多跟蹤系統(tǒng)中,比如車載,由于車的振動導致傳感器位置的變化,表現(xiàn)在圖像上就是背景的運動,因此在做差圖像和背景自動更新之前,都必須先經(jīng)過配準,即讓所有圖像在都同一個坐標系之下,以消除背景的運動。在不同的應用場合,配準的方法多種多樣,比如當兩個圖像之間只有平移變化時,計算出它們的平移量即可實現(xiàn)配準;由于平移變化對圖像的相位信息影響較大,在頻率域利用相位相關(guān)可以實現(xiàn)配準。多系統(tǒng)適配目標跟蹤廠家電話
與目標跟蹤相關(guān)的文章

湖北目標跟蹤優(yōu)勢
- 四川目標跟蹤聯(lián)系方式 2025-08-28
- 貴州數(shù)據(jù)目標跟蹤 2025-08-28
- 湖南信息化目標跟蹤 2025-08-27
- 山東工業(yè)目標跟蹤 2025-08-27
- 湖南目標跟蹤批發(fā)價格 2025-08-27
- 靠譜的目標跟蹤有什么 2025-08-27
- 低壓線目標跟蹤互惠互利 2025-08-26
- 湖北如何目標跟蹤 2025-08-26
- 無源目標跟蹤售后服務 2025-08-26
- 青海目標跟蹤設(shè)備 2025-08-26
- 移動目標跟蹤解決 2025-08-26
- 什么目標跟蹤參考價格 2025-08-26
與目標跟蹤相關(guān)的產(chǎn)品
與目標跟蹤相關(guān)的新聞
-
比較好的目標跟蹤批發(fā)商 2025-08-25 05:03:23目標識別算法是一種深度學習算法,其聰明程度需要我們不斷訓練,這就得益于大量的圖像標注,通過對車輛行駛環(huán)境的數(shù)據(jù)集的大量標注,能夠讓AI更加聰明,標注得越多,識別的精度就可能越高。但是大量的圖像標注跟工作顯然會耗費大量的時間精力。而慧視SpeedDP的出現(xiàn)很好地解決了這個問題。SpeedDP是一個深度...
-
比較好的目標跟蹤報價行情 2025-08-25 03:03:16首先攝像機采用的是可見光高清攝像機,具備1920*1080的分辨率,系統(tǒng)視場31.11°×17.8°,其中搜索視場15.8°×15.8°(1080P像素)。而圖像處理則采用慧視開發(fā)的RV1126高性能圖像處理板,之所以采用這塊板卡,一方面得益于其低功耗、微型外觀的設(shè)計,非常契合“智慧眼”這樣對于空間...
-
陜西目標跟蹤有哪些 2025-08-25 03:03:15目標檢測和跟蹤是計算機視覺領(lǐng)域中的重要任務之一。隨著深度學習的興起,YOLO(You Only Look Once)算法在目標檢測和跟蹤領(lǐng)域引起了廣關(guān)注。YOLO算法是一種在實時目標檢測和跟蹤領(lǐng)域具有重要地位的算法。通過引入卷積神經(jīng)網(wǎng)絡(luò)和一系列先進技術(shù),YOLO算法在速度和準確性方面取得了明顯的進展...
-
無線目標跟蹤多少錢 2025-08-24 03:06:30“啟明935A”系列芯片已經(jīng)成功點亮,并完成各項功能性測試,達到車規(guī)級量產(chǎn)標準。啟明935A是行業(yè)首顆基于Chiplet(芯粒/小芯片)異構(gòu)集成范式的自動駕駛芯片,但并非單一芯片,而是一個家族系列。啟明935HUBChiplet可以和不同數(shù)量的大熊星座AIChiplet互相搭配,再結(jié)合靈活的封裝方式...
與目標跟蹤相關(guān)的問題
新聞資訊
產(chǎn)品推薦
-
北京企業(yè)目標檢測經(jīng)驗豐富
2025-08-28 -
青海多系統(tǒng)適配目標檢測批發(fā)價格
2025-08-28 -

內(nèi)蒙古電力應急目標檢測
2025-08-28 -
寧夏哪里有目標檢測要多少錢
2025-08-27 -
云南可視化視頻壓縮與傳輸解決方案
2025-08-27 -

湖南信息化目標跟蹤
2025-08-27 -

專業(yè)AI智能廠家
2025-08-27 -
浙江高效目標檢測
2025-08-27 -

陜西省時省力目標檢測要多少錢
2025-08-27