
無人機(jī)是巡檢領(lǐng)域的空中巡檢員,搭載智慧“眼”的無人機(jī)能夠替代人工,實(shí)現(xiàn)自主巡檢。無人機(jī)可以搭載紅外光和可見光兩種傳感器,實(shí)現(xiàn)晝夜巡檢也不是夢,一基桿塔*用十分鐘的時間便可完成巡檢工作。例如在電力巡檢中,傳統(tǒng)模式下,工人只能采用望遠(yuǎn)鏡遠(yuǎn)程查看線路,不僅費(fèi)眼睛,還費(fèi)時間。同時,由于光線等外界因素的干擾,...
圖像處理板基本參數(shù)
- 品牌
- 慧視科技
- 型號
- VIZ
- 輸出信號
- 定制,數(shù)字型
- 制作工藝
- 集成,陶瓷,薄膜,定制
- 材質(zhì)
- 定制
- 材料物理性質(zhì)
- 導(dǎo)體,磁性材料,定制
- 材料晶體結(jié)構(gòu)
- 定制
- 加工定制
- 是
圖像處理板企業(yè)商機(jī)
作為一家致力于圖像跟蹤板卡、算法開發(fā)的公司,為了滿足更多行業(yè)的鎖定跟蹤需求,慧視光電一直沒有停止自己的技術(shù)革新。在現(xiàn)在的許多行業(yè)當(dāng)中常常用到攝像頭進(jìn)行遠(yuǎn)程跟蹤或者目標(biāo)檢測,例如安防巡檢、巡湖護(hù)河執(zhí)法、無人機(jī)投彈、周界安防等,當(dāng)遇到目標(biāo)較小不易辨認(rèn)時,雖然能夠看到更多的畫面,但是物體的細(xì)節(jié)看不清,這時就需要通過鏡頭的變倍,來放大成像,來展示更多的物體細(xì)節(jié)。在以前,如果在鎖定跟蹤時進(jìn)行變焦,就會丟失目標(biāo),當(dāng)遇到目標(biāo)出現(xiàn)在復(fù)雜的場景中時,就容易造成再跟蹤失敗的場景,例如在安防巡檢時,有可疑人物入侵了目標(biāo)區(qū)域,為了進(jìn)一步獲取可疑人物的細(xì)節(jié),需要進(jìn)行畫面變倍,看看是男是女、著裝如何、有何特征等,為后期的安保人員搜尋提供信息。圖像識別可以用于量方。福建圖像處理板牌子
圖像處理板
在地鐵站的扶梯入口處,如果乘客有攜帶大件行李乘坐扶梯的情況,容易因?yàn)樾欣畹湓覀渌丝停蝗绻丝陀袑雰很囃迫敕鎏莸那闆r,容易因?yàn)槿狈潭▽?dǎo)致幼兒跌出受傷。如果能及早發(fā)現(xiàn)乘客攜帶大件行李或嬰兒車的事件,運(yùn)營人員可及時對乘客進(jìn)行勸導(dǎo),引導(dǎo)乘客乘坐直梯或確保行李和幼兒被有效固定,避免危險(xiǎn)情況發(fā)生,有效減少安全生產(chǎn)事故。相機(jī)識別乘客攜帶大件行李或嬰兒車的行為,將該情況報(bào)警上報(bào)平臺平臺接收前端相機(jī)報(bào)警,進(jìn)行報(bào)警圖標(biāo)和報(bào)警聲音提示,并關(guān)聯(lián)現(xiàn)場的實(shí)時視頻、報(bào)警錄像視頻、報(bào)警圖片等信息,運(yùn)營人員根據(jù)報(bào)警提示進(jìn)行現(xiàn)場情況復(fù)核確認(rèn),并按照地鐵運(yùn)營處置要求進(jìn)行相應(yīng)勸導(dǎo)處置,完成后在平臺端記錄處置情況,進(jìn)行消警處理海南圖像處理板生產(chǎn)企業(yè)國產(chǎn)自研圖像處理板RV1126。

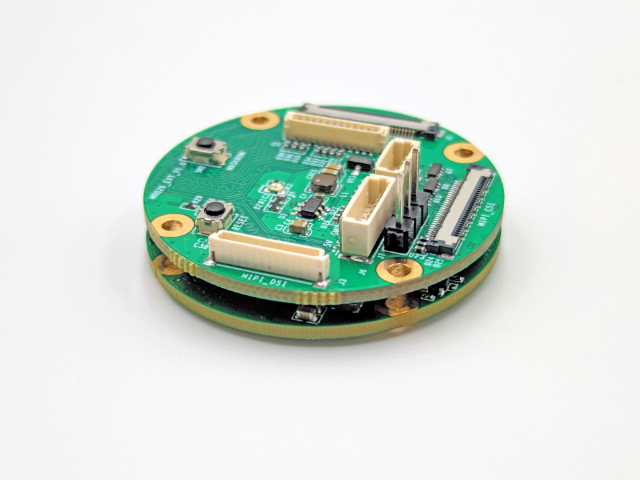
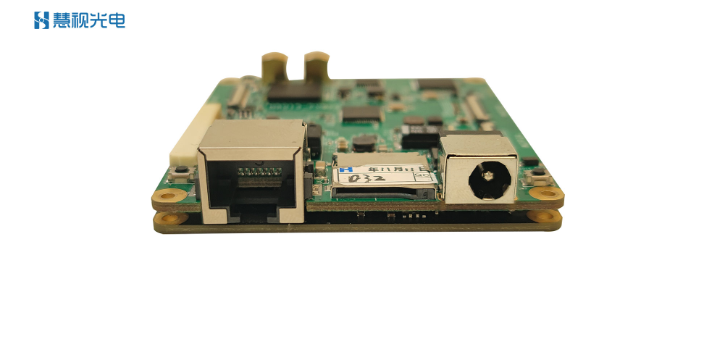
Viztra-LE034圖像跟蹤板采用國內(nèi)智能AI芯片,植入公司自主研發(fā)的智能圖像算法,基于輸入的可見光或者紅外的視頻流,可實(shí)時對目標(biāo)進(jìn)行自主檢測、識別,并自動或人為選擇目標(biāo)進(jìn)行鎖定、跟蹤,同時輸出目標(biāo)相對于視野中心的脫靶量信息。跟蹤板的處理為瑞芯微新一代智能視覺芯片RV1126,基于四核ARMCortex-A7內(nèi)核,內(nèi)置2T算力(NPU),支持4K30FPSH.264/H.265視頻編解碼。基于瑞芯微自研的ISP2.0技術(shù)。RV1126可實(shí)現(xiàn)多級降噪、3幀HDR、黑光全彩技術(shù)特性。
近些年來,隨著我國經(jīng)濟(jì)的快速發(fā)展,國家各項(xiàng)建設(shè)都蒸蒸日上,成績顯而易見。但與此同時,也讓資源與環(huán)境受到了嚴(yán)重破壞。我們的生產(chǎn)生活每天都會殘留數(shù)以萬計(jì)的廢物,給環(huán)境造成了負(fù)擔(dān)。這種現(xiàn)象與垃圾分類投放時的不合理直接相關(guān),而人們對于環(huán)境污染問題反映強(qiáng)烈卻東手無策,這兩者間的矛盾日益尖銳。人們?nèi)粘I钪械睦饕ㄓ泻N余垃圾、可回收垃圾以及其他垃圾這四類。對不同類別的垃圾應(yīng)采取不同分類方法,如果投放不當(dāng),可能會導(dǎo)致各種環(huán)境污染問題。全國產(chǎn)化智能處理板應(yīng)用廣闊。

算法在其本質(zhì)上是解決問題的一種方式,并不限于數(shù)學(xué),例如按照食譜介紹烤面包時,食譜上所有的步驟就是一個算法。算法根據(jù)其自身的復(fù)雜程度可以被分為以下幾種類型:人工智能算法在本質(zhì)上亦屬于一種方法或步驟。現(xiàn)階段人工智能算法的技術(shù)發(fā)展水平處于“黑盒子”階段,開發(fā)“感知者”和“奇點(diǎn)”階段的算法是人工智能開發(fā)者技術(shù)發(fā)展的方向,亦是學(xué)界爭議將來是否存在的焦點(diǎn)問題之一。關(guān)于人工智能算法的界定,有人認(rèn)為:算法不需要是軟件,從某種意義上來說,算法是基于指定的運(yùn)行過程將輸入數(shù)據(jù)轉(zhuǎn)換為期望輸出的編碼過程。慧視光電開發(fā)了多款圖像跟蹤板。貴州人防圖像處理板
RK3588圖像處理板怎么定制?福建圖像處理板牌子
模式識別是圖像處理的一種,當(dāng)前,模式識別的應(yīng)用范圍十分廣,它的觀察對象囊括了人類感官直接或間接接受的外界信息。而運(yùn)用模式識別的目的,則是利用計(jì)算機(jī)模仿人的識別能力來辨別觀察對象。模式識別方法大致可分為兩種,即結(jié)構(gòu)方法和決策理論方法,其中決策理論方法又稱為統(tǒng)計(jì)方法。字符模式識別的方法可以大致分為統(tǒng)計(jì)模式識別、結(jié)構(gòu)模式識別和人工神經(jīng)網(wǎng)絡(luò)等。上述的圖像識別步驟就是模式識別的基本步驟了常用的模式識別方法之一是模板匹配,顧名思義,就是在輸入圖像上不斷切割出臨時圖像、并將之與模板圖像匹配,如果相似度足夠高,就認(rèn)為我們尋找到了應(yīng)有的目標(biāo),最常見的匹配方法包括平方差匹配法、相關(guān)匹配法、相關(guān)系數(shù)匹配法等。以下我們都將以模板匹配為例,說明模型識別的概念。福建圖像處理板牌子
與圖像處理板相關(guān)的文章

無線圖像處理板大概價格多少
- 山東可靠圖像處理板 2025-08-22
- 圖像處理板費(fèi)用是多少 2025-08-22
- 移動圖像處理板聯(lián)系方式 2025-08-21
- 上海圖像處理板銷售廠家 2025-08-21
- 移動圖像處理板售后服務(wù) 2025-08-21
- 比較好的圖像處理板大概價格 2025-08-21
- 放心圖像處理板經(jīng)驗(yàn)豐富 2025-08-21
- 工業(yè)圖像處理板價格信息 2025-08-21
- 浙江圖像處理板批量定制 2025-08-21
- 黑龍江圖像處理板廠家現(xiàn)貨 2025-08-21
- 遼寧圖像處理板廠家現(xiàn)貨 2025-08-21
- 網(wǎng)絡(luò)圖像處理板型號 2025-08-20
與圖像處理板相關(guān)的產(chǎn)品


與圖像處理板相關(guān)的新聞
-
哪些圖像處理板哪里買 2025-08-19 01:06:28利用圖像處理技術(shù)實(shí)現(xiàn)導(dǎo)彈的遠(yuǎn)程打擊是一項(xiàng)運(yùn)用了比較長時間的技術(shù),相比于現(xiàn)代化的電子控制,它具備低受干擾的特點(diǎn),特別是無人機(jī)在軍備領(lǐng)域的廣泛應(yīng)用,圖像處理的作用重新受到重視。遠(yuǎn)程打擊時,需要對整個彈的識別能力進(jìn)行深度學(xué)習(xí)訓(xùn)練,不斷的訓(xùn)練能夠讓AI更加聰明,讓AI知道該打擊什么,從而提升打擊精度。在前期...
-
上海圖像處理板價格多少 2025-08-19 11:08:23此前,九號電動車的自平衡技術(shù)一次次刷新人們的認(rèn)知,而其中一款探索版車型,甚至加入了智能攝像頭,能夠識別行人、障礙物,自動規(guī)劃行駛路線,達(dá)成自動駕駛的目的。很多人好奇這種怎么做到的,其實(shí)很簡單,車輛內(nèi)部攝像頭安裝了具備圖像處理的傳感器。這種傳感器就是圖像處理板,這類AI板卡在目標(biāo)識別算法的賦能下,就能...
-
甘肅圖像處理板工程 2025-08-19 02:04:14這種智慧化的建設(shè)就是采用圖像處理。在無人機(jī)內(nèi)部安裝圖像處理板,這些圖像處理板和相機(jī)、算法的有機(jī)結(jié)合就形成了無人機(jī)的智慧眼,有了這個智慧眼,無人機(jī)就能夠?qū)σ曇胺秶鷥?nèi)的物體進(jìn)行AI識別,從而自動完成避障、巡檢等操作。成都慧視開發(fā)的小型化圖像處理板Viztra-LE026就是專門為無人機(jī)設(shè)計(jì)的一款“智慧眼...
-
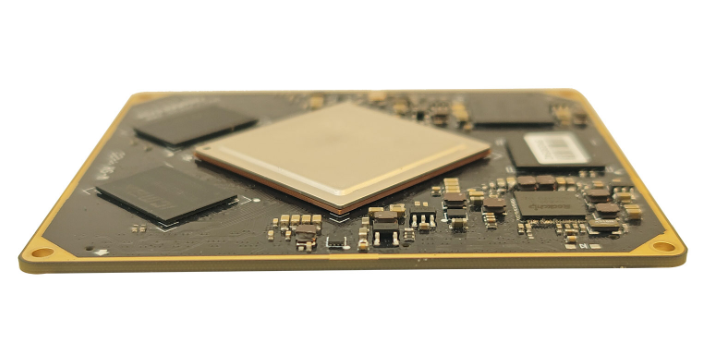
上海圖像處理板類型 2025-08-19 00:13:03RK3588作為瑞芯微旗艦級芯片,工業(yè)級的算力受到了很多領(lǐng)域的青睞,但是由于前端相機(jī)的選擇不同,并不是每塊RK3588的圖像處理板都可以直接拿來使用,需要的是根據(jù)相機(jī)接口和應(yīng)用場景進(jìn)行深度定制。成都慧視光電技術(shù)有限公司就有這樣的快速集成定制的能力。作為擁有多年圖像處理板開發(fā)經(jīng)驗(yàn)的團(tuán)隊(duì),成都慧視能夠快...
與圖像處理板相關(guān)的問題
與圖像處理板相關(guān)的標(biāo)簽
新聞資訊
產(chǎn)品推薦
-
寧夏哪里有目標(biāo)檢測要多少錢
2025-08-27 -
云南可視化視頻壓縮與傳輸解決方案
2025-08-27 -

湖南信息化目標(biāo)跟蹤
2025-08-27 -

專業(yè)AI智能廠家
2025-08-27 -
浙江高效目標(biāo)檢測
2025-08-27 -

陜西省時省力目標(biāo)檢測要多少錢
2025-08-27 -

重慶智慧視覺AI智能算法分析
2025-08-27 -
湖北省時省力目標(biāo)識別創(chuàng)意
2025-08-27 -

山東工業(yè)目標(biāo)跟蹤
2025-08-27