產(chǎn)品一致性是服務(wù)器裝配的要求,機器人力控為保障這一要求提供了可靠支撐。服務(wù)器內(nèi)部部件精密,若裝配力度不均或位置偏差,可能影響設(shè)備性能甚至使用壽命。人工裝配時,受經(jīng)驗、體力等因素影響,不同操作人員的裝配效果易出現(xiàn)差異。機器人力控通過穩(wěn)定的力值控制和精細的軌跡引導,確保每臺服務(wù)器的裝配步驟、力度參數(shù)保持...
機器人力控基本參數(shù)
- 品牌
- 達寬科技,簡控機器人,新藍機器人
- 服務(wù)內(nèi)容
- 軟件開發(fā),軟件定制,技術(shù)開發(fā)
- 版本類型
- 普通版,增強版,標準版,測試版,單用戶版
- 適用范圍
- 企業(yè)用戶
機器人力控企業(yè)商機
安全性在生產(chǎn)過程中至關(guān)重要,力控系統(tǒng)在線束裝配中有效提升了作業(yè)安全性。線束裝配涉及細小金屬接頭、電線等部件,人工操作時若力度控制不當,可能出現(xiàn)手部劃傷或部件損壞的風險。引入力控系統(tǒng)后,機器人可在設(shè)定的安全力值范圍內(nèi)完成操作,當檢測到超出安全范圍的力值時,會及時調(diào)整動作或暫停作業(yè)。達寬科技在力控系統(tǒng)設(shè)計中融入了多重安全監(jiān)測機制,通過實時力值反饋和動作調(diào)控,降低操作過程中的意外風險,為企業(yè)構(gòu)建更安全的生產(chǎn)環(huán)境。機器人力控裝配電池防爆閥,靈活適應(yīng)多種任務(wù),提升工作效率。新疆協(xié)作機器人力控抓取

在生產(chǎn)效率提升方面,機器人力控展現(xiàn)出獨特優(yōu)勢。傳統(tǒng) PCBA 裝配中,操作人員需針對 PCBA 反復(fù)校準機器人程序參數(shù),調(diào)整抓取與放置位置,不僅占用大量調(diào)試時間,還難以適應(yīng)多品種、小批量的柔性生產(chǎn)需求。達寬科技的機器人力控系統(tǒng)通過實時力反饋調(diào)節(jié),讓機器人具備自主適應(yīng)能力。面對不同批次 PCBA 的細微尺寸差異和輕微偏移,機器人力控能自動修正機器人的運動路徑和接觸力度,減少停機調(diào)試環(huán)節(jié)。裝配流程從 “被動等待參數(shù)調(diào)整” 轉(zhuǎn)為 “主動適應(yīng)差異變化”,讓生產(chǎn)線的連續(xù)運轉(zhuǎn)更有保障,間接優(yōu)化整體生產(chǎn)節(jié)奏。重慶協(xié)作機器人力控達寬科技機器人力控記錄全流程裝配參數(shù),實現(xiàn)問題批次快速定位。

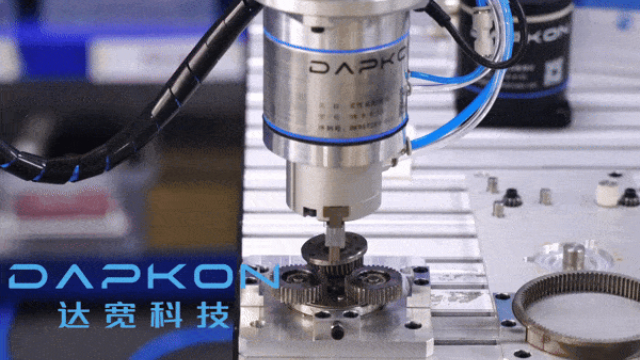
電機齒輪裝配對位置精度和配合力有著嚴格要求。機器人力控技術(shù)為解決這一難題提供了有效途徑。在齒輪軸孔配合環(huán)節(jié),機器人力控系統(tǒng)能夠?qū)崟r感知接觸狀態(tài),通過柔順控制自動調(diào)整機械臂的位姿和出力。達寬科技開發(fā)的機器人力控方案,采用高靈敏度力覺傳感與動態(tài)響應(yīng)算法,確保齒輪齒槽與軸齒在接觸瞬間實現(xiàn)自適應(yīng)引導。操作人員設(shè)定好目標接觸力范圍后,機器人力控系統(tǒng)即可自主完成精細的導入過程,有效避免傳統(tǒng)硬性裝配可能產(chǎn)生的齒面壓痕或配合偏差。這種基于力覺反饋的智能裝配方式,提升了微小間隙配合的成功率,為用戶帶來了更順暢的裝配體驗。
隨著制造業(yè)智能化發(fā)展,力控系統(tǒng)在線束裝配中的應(yīng)用場景不斷拓展。無論是汽車線束的復(fù)雜對接、家電內(nèi)部線束的規(guī)整排布,還是電子設(shè)備中線束的精細連接,力控系統(tǒng)都能憑借其靈活性適配多樣化需求。達寬科技持續(xù)聚焦力控技術(shù)的場景化應(yīng)用,根據(jù)不同行業(yè)線束裝配的特點,提供定制化的力控系統(tǒng)解決方案,幫助企業(yè)實現(xiàn)機器人在更多場景下的高效應(yīng)用。通過優(yōu)化力控算法和硬件適配性,達寬科技讓力控系統(tǒng)更好地貼合實際生產(chǎn)需求,為線束裝配行業(yè)的智能化升級提供有力支持。達寬科技機器人力控實現(xiàn)多點同步壓力測試,確保座椅舒適度達標。
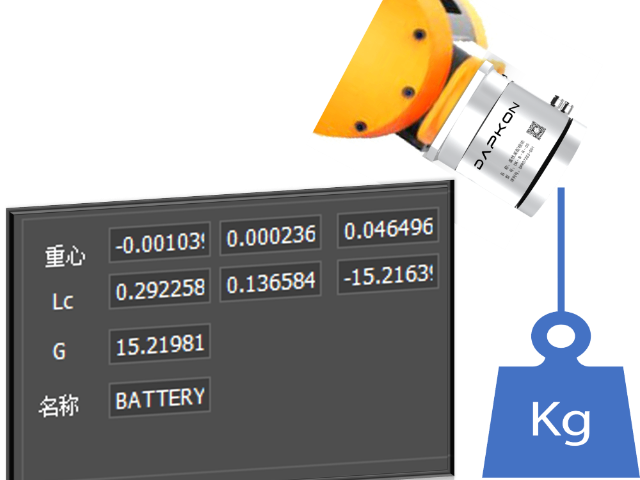
在現(xiàn)代制造業(yè)中,電機齒輪的裝配精度直接關(guān)系到電機的運行效率與壽命。達寬科技的機器人力控系統(tǒng)為這一關(guān)鍵環(huán)節(jié)帶來了性的變革。機器人力控通過高精度的六維力傳感器,實時監(jiān)測裝配過程中齒輪與軸之間的微小受力變化。當機械臂將齒輪緩緩套入電機軸時,力控系統(tǒng)能夠敏銳地感知力變化,并調(diào)整機械臂的姿態(tài)和力度。這種基于物理反饋的裝配方式,徹底改變了傳統(tǒng)依賴固定程序和示教點的機器人作業(yè)模式。操作人員只需在系統(tǒng)中設(shè)定合理的力矩范圍和位移參數(shù),機器人便能像經(jīng)驗豐富的技師一樣,靈活應(yīng)對齒輪個體差異帶來的裝配挑戰(zhàn)。相比傳統(tǒng)裝配方案,力控系統(tǒng)大幅減少了因力度不當導致的齒輪磕碰和軸的磨損,每一次嚙合都恰到好處,從而提升了裝配成功率,讓電機齒輪的裝配過程更加流暢、高效,為制造業(yè)帶來全新的智能化裝配體驗。達寬科技機器人力控,裝配電池防爆閥更輕松,效率提升有保障。海南工業(yè)機器人力控推廣
達寬科技機器人力控,讓電池線束裝配更準確、更可靠。新疆協(xié)作機器人力控抓取
電機齒輪作為動力傳動部件,裝配過程對齒間貼合精度、軸心同心度要求嚴格。傳統(tǒng)裝配方式中,齒輪材質(zhì)差異、加工誤差等因素易導致嚙合卡頓、齒面磨損,甚至影響電機運行穩(wěn)定性。機器人力控技術(shù)的引入為解決這些問題提供了有效路徑。達寬科技的機器人力控方案能實時捕捉機器人末端與齒輪接觸時的力覺變化,通過動態(tài)調(diào)節(jié)機器人動作參數(shù),讓裝配過程具備細膩的 “力覺感知” 能力。無論是主動齒輪與從動齒輪的齒槽對準,還是齒輪與電機軸的嵌套裝配,機器人力控都能精細把控接觸力度與運動軌跡,讓電機齒輪裝配過程更流暢、更可靠。新疆協(xié)作機器人力控抓取
與機器人力控相關(guān)的文章

安徽協(xié)作機器人力控
- 浙江機器人力控拋光 2025-08-27
- 天津協(xié)作機器人力控設(shè)計 2025-08-26
- 湖北機器人力控技術(shù)指導 2025-08-26
- 湖南工業(yè)機器人力控廠家 2025-08-26
- 海南工業(yè)機器人力控技術(shù)指導 2025-08-26
- 貴州協(xié)作機器人力控推廣 2025-08-26
- 河南協(xié)作機器人力控設(shè)計 2025-08-26
- 遼寧協(xié)作機器人力控原理 2025-08-26
- 上海協(xié)作機器人力控設(shè)計 2025-08-24
- 安徽工業(yè)機器人力控檢測 2025-08-24
- 陜西工業(yè)機器人力控優(yōu)點 2025-08-24
- 福建工業(yè)機器人力控優(yōu)點 2025-08-14
與機器人力控相關(guān)的產(chǎn)品
與機器人力控相關(guān)的新聞
-
吉林機器人力控推廣 2025-08-12 16:08:04達寬科技的機器人力控表面處理方案,為用戶提供一站式解決方案,無縫整合到現(xiàn)有機器人系統(tǒng)中,實現(xiàn)任務(wù)優(yōu)化。該方案基于模塊化設(shè)計,支持快速部署,幫助用戶節(jié)省調(diào)試時間并提高處理效率。機器人力控的在于其自適應(yīng)能力,能根據(jù)不同表面特性調(diào)整參數(shù),確保一致輸出。達寬科技通過專業(yè)支持和持續(xù)更新,讓機器人力控易于維護,...
-
遼寧機器人力控監(jiān)測 2025-08-12 00:18:05電子組裝產(chǎn)線的瓶頸常出現(xiàn)在精密部件裝配環(huán)節(jié)。引入機器人力控技術(shù)可實質(zhì)性改善生產(chǎn)節(jié)拍。在散熱模組壓合、接口端子鎖緊等工序中,機器人力控系統(tǒng)通過智能化的力軌跡規(guī)劃,大幅減少人工干預(yù)頻率。系統(tǒng)實時解析接觸阻力變化趨勢,自動優(yōu)化下壓力度和角度,保持產(chǎn)線連續(xù)運行。達寬科技的機器人力控解決方案支持主流SMT設(shè)備...
-
河南協(xié)作機器人力控技術(shù)指導 2025-08-12 09:16:25隨著精密制造行業(yè)的發(fā)展,機器人力控在齒輪裝配領(lǐng)域的應(yīng)用場景不斷延伸。無論是小型精密齒輪的裝配,還是大型傳動齒輪的對接,機器人力控都能憑借其靈活性與適應(yīng)性滿足多樣化需求。達寬科技持續(xù)深耕機器人力控技術(shù)創(chuàng)新,針對不同齒輪裝配場景的工藝特點,提供定制化解決方案,助力企業(yè)實現(xiàn)機器人在更多精密裝配任務(wù)中的高效...
-
新疆協(xié)作機器人力控抓取 2025-08-11 06:13:41安全性在生產(chǎn)過程中至關(guān)重要,力控系統(tǒng)在線束裝配中有效提升了作業(yè)安全性。線束裝配涉及細小金屬接頭、電線等部件,人工操作時若力度控制不當,可能出現(xiàn)手部劃傷或部件損壞的風險。引入力控系統(tǒng)后,機器人可在設(shè)定的安全力值范圍內(nèi)完成操作,當檢測到超出安全范圍的力值時,會及時調(diào)整動作或暫停作業(yè)。達寬科技在力控系統(tǒng)設(shè)...
與機器人力控相關(guān)的問題
與機器人力控相關(guān)的標簽
新聞資訊
產(chǎn)品推薦
-

遼寧協(xié)作機器人力控原理
2025-08-26 -

湖北機器人柔性力控系統(tǒng)使用方法
2025-08-25 -

廣東新藍機器人力控系統(tǒng)方案
2025-08-25 -

北京力控系統(tǒng)廠家
2025-08-25 -
達寬科技力控系統(tǒng)廠家
2025-08-25 -

湖北力控系統(tǒng)方案
2025-08-25 -

湖北拋光力控系統(tǒng)廠家
2025-08-25 -

上海拋光力控系統(tǒng)供應(yīng)商
2025-08-25 -
遼寧測試力控系統(tǒng)優(yōu)勢
2025-08-25