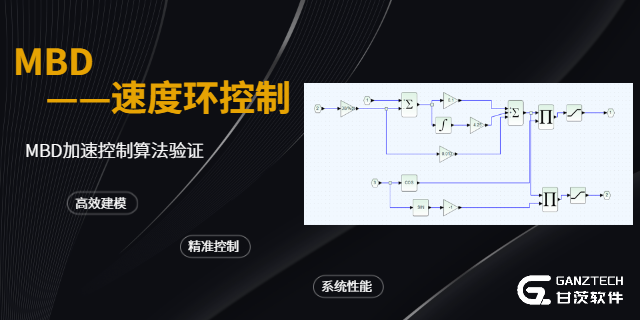
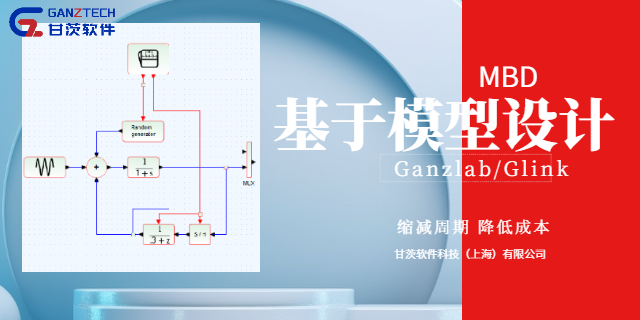
汽車(chē)領(lǐng)域基于模型設(shè)計(jì)(MBD)的優(yōu)勢(shì)體現(xiàn)在需求可視化、早期驗(yàn)證與團(tuán)隊(duì)協(xié)作效率提升三個(gè)方面。需求可視化層面,MBD能將“急加速時(shí)換擋平順性”等抽象功能需求轉(zhuǎn)化為可執(zhí)行圖形化模型,通過(guò)狀態(tài)機(jī)、數(shù)據(jù)流圖等元素直觀呈現(xiàn)控制邏輯,降低需求歧義性,便于開(kāi)發(fā)團(tuán)隊(duì)與需求方達(dá)成共識(shí)。早期驗(yàn)證方面,MBD支持開(kāi)發(fā)全過(guò)程...
基于模型設(shè)計(jì)(MBD)基本參數(shù)
- 品牌
- Ganztech
- 型號(hào)
- MBD建模
- 軟件類(lèi)型
- 仿真建模軟件
- 版本類(lèi)型
- 網(wǎng)絡(luò)版
- 語(yǔ)言版本
- 簡(jiǎn)體中文版
基于模型設(shè)計(jì)(MBD)企業(yè)商機(jī)
車(chē)載通信系統(tǒng)建模聚焦于車(chē)內(nèi)各類(lèi)網(wǎng)絡(luò)的信號(hào)傳輸邏輯與可靠性驗(yàn)證,覆蓋CAN/LIN總線、車(chē)載以太網(wǎng)等多種通信方式。CAN總線建模需定義報(bào)文ID、數(shù)據(jù)長(zhǎng)度與傳輸周期,通過(guò)構(gòu)建總線調(diào)度模型,計(jì)算不同節(jié)點(diǎn)(如發(fā)動(dòng)機(jī)ECU、ABS控制器)的報(bào)文發(fā)送錯(cuò)誤概率,優(yōu)化總線負(fù)載率以確保關(guān)鍵信號(hào)(如制動(dòng)指令)的實(shí)時(shí)性。LIN總線建模針對(duì)車(chē)身電子等低速率場(chǎng)景,模擬主從節(jié)點(diǎn)的通信協(xié)議,驗(yàn)證燈光、雨刮等控制信號(hào)的傳輸延遲,避免因通信延遲導(dǎo)致的功能異常。車(chē)載以太網(wǎng)建模則需考慮高帶寬需求,構(gòu)建通信協(xié)議棧模型,仿真自動(dòng)駕駛多傳感器(激光雷達(dá)、攝像頭)的海量數(shù)據(jù)傳輸過(guò)程,分析網(wǎng)絡(luò)擁塞對(duì)數(shù)據(jù)同步的影響。建模過(guò)程需整合通信硬件特性(如傳輸速率、抗干擾能力),通過(guò)仿真模擬電磁干擾、線束阻抗變化等工況,驗(yàn)證通信系統(tǒng)的容錯(cuò)能力,確保車(chē)內(nèi)信號(hào)傳輸?shù)姆€(wěn)定性與安全性。能源與電力領(lǐng)域MBD工具,要能建電力系統(tǒng)模型,支持穩(wěn)定性分析與控制算法驗(yàn)證。西藏MBD有哪些靠譜平臺(tái)

生物系統(tǒng)建模的開(kāi)發(fā)優(yōu)勢(shì)體現(xiàn)在對(duì)復(fù)雜生理過(guò)程的量化解析與實(shí)驗(yàn)成本優(yōu)化上。在藥物研發(fā)領(lǐng)域,通過(guò)構(gòu)建藥物動(dòng)力學(xué)(PK)與藥效學(xué)(PD)耦合模型,能精確計(jì)算藥物在體內(nèi)的吸收、分布、代謝過(guò)程,預(yù)測(cè)不同劑量下的藥效與毒副作用,大幅減少動(dòng)物實(shí)驗(yàn)次數(shù),縮短研發(fā)周期。針對(duì)心電信號(hào)分析,建模可將抽象的心電圖(ECG)特征轉(zhuǎn)化為可計(jì)算的數(shù)學(xué)模型,量化分析心肌缺血、心律失常等病理狀態(tài)下的信號(hào)變化規(guī)律,為疾病診斷算法開(kāi)發(fā)提供標(biāo)準(zhǔn)化的驗(yàn)證依據(jù)。生物系統(tǒng)建模還支持多尺度分析,既能模擬細(xì)胞內(nèi)分子相互作用的微觀過(guò)程,也能推演人體系統(tǒng)的宏觀功能變化,幫助研究者從整體視角理解生物系統(tǒng)的調(diào)控機(jī)制。此外,建模過(guò)程產(chǎn)生的數(shù)字化模型可重復(fù)使用與參數(shù)調(diào)整,便于開(kāi)展多變量影響分析,為生物醫(yī)學(xué)研究提供高效的虛擬實(shí)驗(yàn)平臺(tái)。西藏自動(dòng)駕駛系統(tǒng)建模服務(wù)價(jià)格基于模型設(shè)計(jì)可運(yùn)用于汽車(chē)、航空、工業(yè)等多領(lǐng)域,覆蓋控制與仿真相關(guān)的開(kāi)發(fā)環(huán)節(jié)。
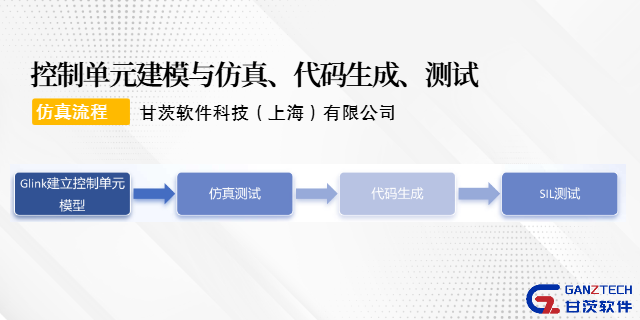
應(yīng)用層軟件開(kāi)發(fā)MBD通過(guò)圖形化建模將功能需求轉(zhuǎn)化為可執(zhí)行模型,覆蓋邏輯設(shè)計(jì)、仿真驗(yàn)證到代碼生成的全流程。在汽車(chē)電子應(yīng)用層開(kāi)發(fā)中,可針對(duì)發(fā)動(dòng)機(jī)控制器ECU的傳感器信號(hào)處理、執(zhí)行器驅(qū)動(dòng)邏輯構(gòu)建模塊化模型,每個(gè)功能模塊通過(guò)清晰接口傳遞數(shù)據(jù),直觀呈現(xiàn)“信號(hào)輸入-邏輯運(yùn)算-指令輸出”的完整鏈路。建模過(guò)程支持狀態(tài)機(jī)邏輯設(shè)計(jì),如車(chē)身電子控制中的燈光切換、門(mén)窗調(diào)節(jié)等功能,能通過(guò)狀態(tài)轉(zhuǎn)移圖定義不同輸入(如遙控指令、車(chē)內(nèi)按鍵)對(duì)應(yīng)的執(zhí)行動(dòng)作,避免邏輯漏洞。MBD工具可自動(dòng)將驗(yàn)證通過(guò)的模型轉(zhuǎn)化為嵌入式代碼,減少手動(dòng)編碼錯(cuò)誤,同時(shí)支持模型與代碼的一致性校驗(yàn),確保應(yīng)用層軟件能穩(wěn)定運(yùn)行在目標(biāo)硬件上,提升開(kāi)發(fā)效率與質(zhì)量。
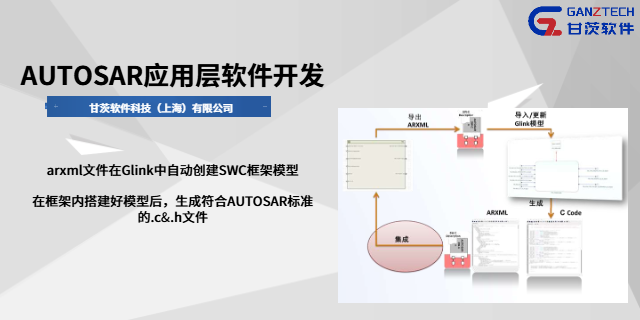
汽車(chē)控制器軟件MBD好用的軟件需具備符合行業(yè)標(biāo)準(zhǔn)的建模環(huán)境與全流程支持能力。功能上,應(yīng)支持基于AUTOSAR標(biāo)準(zhǔn)的模塊化建模,提供豐富的汽車(chē)控制算法庫(kù)(如發(fā)動(dòng)機(jī)控制、底盤(pán)控制模塊),便于快速搭建ECU、VCU等控制器的軟件架構(gòu)。代碼生成能力至關(guān)重要,需能支持代碼與模型的雙向追溯,確保一致性。測(cè)試驗(yàn)證工具需集成需求管理、覆蓋率分析功能,支持模型在環(huán)與硬件在環(huán)測(cè)試的無(wú)縫銜接,驗(yàn)證控制算法在不同工況下的有效性。好用的軟件還應(yīng)符合ISO26262功能安全標(biāo)準(zhǔn),提供功能安全分析工具,助力控制器軟件通過(guò)認(rèn)證,同時(shí)具備良好的兼容性,能與主流的仿真平臺(tái)、測(cè)試設(shè)備對(duì)接,提升開(kāi)發(fā)流程順暢性。甘茨軟件科技通過(guò)了ISO26262道路車(chē)輛安全管理體系A(chǔ)SIL-D認(rèn)證,作為AUTOSAR組織開(kāi)發(fā)合作伙伴,其相關(guān)軟件可應(yīng)用于汽車(chē)控制器軟件MBD開(kāi)發(fā)中。汽車(chē)領(lǐng)域基于模型設(shè)計(jì)市場(chǎng)報(bào)價(jià),需結(jié)合服務(wù)內(nèi)容與建模精度,性價(jià)比高更受青睞。
電子與通信領(lǐng)域MBD是將復(fù)雜系統(tǒng)功能需求轉(zhuǎn)化為可執(zhí)行模型的開(kāi)發(fā)方法,貫穿從算法設(shè)計(jì)到代碼實(shí)現(xiàn)的全流程。在集成電路設(shè)計(jì)中,MBD支持?jǐn)?shù)字信號(hào)處理(DSP)算法的圖形化建模,工程師可通過(guò)搭建濾波器、調(diào)制解調(diào)器等模塊,模擬5G基帶信號(hào)的處理過(guò)程,精確計(jì)算信噪比、誤碼率等關(guān)鍵指標(biāo),優(yōu)化算法性能。通訊設(shè)備嵌入式軟件開(kāi)發(fā)中,MBD能將設(shè)備控制邏輯(如射頻模塊功率調(diào)節(jié)、信道切換)轉(zhuǎn)化為狀態(tài)機(jī)模型,通過(guò)仿真驗(yàn)證不同輸入信號(hào)對(duì)應(yīng)的執(zhí)行動(dòng)作,確保控制邏輯的完整性。針對(duì)通訊網(wǎng)絡(luò)協(xié)議開(kāi)發(fā),MBD可構(gòu)建協(xié)議棧的分層模型,模擬物理層、數(shù)據(jù)鏈路層、網(wǎng)絡(luò)層的交互過(guò)程,分析協(xié)議開(kāi)銷(xiāo)對(duì)傳輸效率的影響,為協(xié)議優(yōu)化提供量化依據(jù)。該方法支持模型與代碼的自動(dòng)轉(zhuǎn)換,能生成符合嵌入式系統(tǒng)要求的高效代碼,同時(shí)通過(guò)模型在環(huán)、軟件在環(huán)等多階段驗(yàn)證,確保電子與通信系統(tǒng)的功能正確性與性能指標(biāo)達(dá)標(biāo)。算法原型工程化轉(zhuǎn)化基于模型設(shè)計(jì)國(guó)產(chǎn)平臺(tái),可銜接算法與工程實(shí)現(xiàn),加速成果落地。浙江圖形化建模基于模型設(shè)計(jì)好用的軟件
汽車(chē)控制器軟件基于模型設(shè)計(jì),能將復(fù)雜邏輯可視化,覆蓋從需求到代碼生成,讓開(kāi)發(fā)更順暢。西藏MBD有哪些靠譜平臺(tái)
機(jī)械臂DH參數(shù)建模MBD借助圖形化建模工具,將機(jī)械臂的連桿長(zhǎng)度、關(guān)節(jié)轉(zhuǎn)角、連桿偏距等結(jié)構(gòu)參數(shù)轉(zhuǎn)化為規(guī)范化的運(yùn)動(dòng)學(xué)模型,實(shí)現(xiàn)對(duì)機(jī)械臂運(yùn)動(dòng)軌跡的準(zhǔn)確仿真。在建模過(guò)程中,按照DH法則確立各連桿的坐標(biāo)系,通過(guò)矩陣運(yùn)算構(gòu)建相鄰關(guān)節(jié)間的變換關(guān)系,從而自動(dòng)求解機(jī)械臂末端執(zhí)行器在三維空間中的位姿。基于MBD流程,可對(duì)DH參數(shù)進(jìn)行參數(shù)化調(diào)整,仿真不同參數(shù)組合下機(jī)械臂的工作空間范圍與運(yùn)動(dòng)靈活性,快速篩選出符合設(shè)計(jì)需求的結(jié)構(gòu)參數(shù)。對(duì)于多關(guān)節(jié)機(jī)械臂,需構(gòu)建包含全部DH參數(shù)的整體運(yùn)動(dòng)學(xué)模型,考慮關(guān)節(jié)間的耦合效應(yīng),模擬復(fù)雜運(yùn)動(dòng)軌跡下各關(guān)節(jié)的角度變化曲線,為軌跡規(guī)劃算法的開(kāi)發(fā)提供精確的仿真對(duì)象,同時(shí)可銜接動(dòng)力學(xué)分析模塊,計(jì)算不同運(yùn)動(dòng)狀態(tài)下的關(guān)節(jié)驅(qū)動(dòng)力矩,為機(jī)械臂的結(jié)構(gòu)優(yōu)化與驅(qū)動(dòng)選型提供數(shù)據(jù)支撐。西藏MBD有哪些靠譜平臺(tái)
與基于模型設(shè)計(jì)(MBD)相關(guān)的文章

浙江圖形化建模MBD有哪些工具
- 陜西應(yīng)用層軟件開(kāi)發(fā)MBD優(yōu)勢(shì)有哪些 2025-08-26
- 西藏MBD有哪些靠譜平臺(tái) 2025-08-26
- 黑龍江汽車(chē)控制器軟件系統(tǒng)建模開(kāi)發(fā)費(fèi)用 2025-08-25
- 青海autosar國(guó)產(chǎn)工具鏈基于模型設(shè)計(jì)全流程解決方案 2025-08-25
- 江西MBD用什么工具 2025-08-25
- 海南autosar國(guó)產(chǎn)工具鏈MBD全流程解決方案 2025-08-25
- 沈陽(yáng)需求分析MBD用什么工具 2025-08-24
- 湖北車(chē)載通信系統(tǒng)建模哪個(gè)開(kāi)發(fā)公司靠譜 2025-08-24
- 上海汽車(chē)MBD國(guó)產(chǎn)平臺(tái) 2025-08-24
- 江蘇系統(tǒng)建模有什么用途 2025-08-24
- 黑龍江車(chē)載通信基于模型設(shè)計(jì) 2025-08-24
- 湖北智能基于模型設(shè)計(jì)服務(wù)商推薦 2025-08-23
與基于模型設(shè)計(jì)(MBD)相關(guān)的產(chǎn)品
與基于模型設(shè)計(jì)(MBD)相關(guān)的新聞
-
烏魯木齊自動(dòng)代碼生成系統(tǒng)建模哪個(gè)軟件性價(jià)比高 2025-08-21 06:09:00機(jī)器人領(lǐng)域基于模型設(shè)計(jì)(MBD)的開(kāi)發(fā)優(yōu)勢(shì)體現(xiàn)在縮短開(kāi)發(fā)周期、提升控制精度與增強(qiáng)系統(tǒng)可靠性三個(gè)方面。開(kāi)發(fā)周期上,MBD通過(guò)圖形化建模與早期仿真,使機(jī)械臂DH參數(shù)優(yōu)化、控制算法驗(yàn)證等工作可在物理樣機(jī)制作前完成,如通過(guò)仿真快速確定機(jī)器人運(yùn)動(dòng)學(xué)參數(shù),減少樣機(jī)迭代次數(shù)。控制精度方面,MBD支持控制算法與動(dòng)力...
-
西藏工業(yè)控制MBD適合中小企業(yè)嗎 2025-08-21 02:07:11機(jī)器人領(lǐng)域基于模型設(shè)計(jì)(MBD)工具需適配多域控制特性,涵蓋動(dòng)力學(xué)建模、控制算法設(shè)計(jì)與代碼生成功能。動(dòng)力學(xué)建模工具應(yīng)能構(gòu)建機(jī)械臂DH參數(shù)模型,自動(dòng)計(jì)算運(yùn)動(dòng)學(xué)正逆解,模擬不同關(guān)節(jié)角度下的末端位置,支持重力補(bǔ)償、摩擦力矩等動(dòng)力學(xué)特性分析,為控制算法設(shè)計(jì)提供精確植物模型。控制算法設(shè)計(jì)工具需具備圖形化建模能...
-
北京autosar國(guó)產(chǎn)工具鏈系統(tǒng)建模適合中小企業(yè)嗎 2025-08-20 09:17:32能源與電力領(lǐng)域MBD工具需具備電力系統(tǒng)建模、控制算法驗(yàn)證與多場(chǎng)景仿真的綜合能力。針對(duì)電網(wǎng)潮流計(jì)算,工具應(yīng)支持節(jié)點(diǎn)導(dǎo)納矩陣構(gòu)建與牛頓-拉夫遜法求解,能模擬不同負(fù)荷分布下的電壓、功率損耗情況,分析分布式電源接入對(duì)電網(wǎng)穩(wěn)定性的影響。微電網(wǎng)能量調(diào)度建模工具需整合光伏、風(fēng)電、儲(chǔ)能等設(shè)備模型,支持能量管理策略(...
-
需求分析系統(tǒng)建模服務(wù)商推薦 2025-08-20 03:08:20車(chē)載通信基于模型設(shè)計(jì)性價(jià)比高的軟件,需在功能覆蓋與成本控制間達(dá)到平衡。基礎(chǔ)功能上,應(yīng)能滿足CAN/LIN總線的報(bào)文調(diào)度建模、信號(hào)解析邏輯仿真等需求,支持總線負(fù)載率計(jì)算與風(fēng)險(xiǎn)分析,無(wú)需為冗余的高級(jí)功能支付額外費(fèi)用。針對(duì)車(chē)載以太網(wǎng)的基礎(chǔ)建模,軟件需提供TCP/IP協(xié)議棧的簡(jiǎn)化模型,能模擬高帶寬數(shù)據(jù)傳輸場(chǎng)...
與基于模型設(shè)計(jì)(MBD)相關(guān)的問(wèn)題
與基于模型設(shè)計(jì)(MBD)相關(guān)的標(biāo)簽
新聞資訊
產(chǎn)品推薦
-
甘肅底盤(pán)控制仿真驗(yàn)證什么品牌服務(wù)好
2025-08-25 -
黑龍江汽車(chē)控制器軟件系統(tǒng)建模開(kāi)發(fā)費(fèi)用
2025-08-25 -

江西PID智能控制算法的作用
2025-08-25 -
湖北仿真模擬科學(xué)分析怎么優(yōu)化
2025-08-25 -
青海整車(chē)動(dòng)力性能汽車(chē)仿真哪個(gè)工具準(zhǔn)確
2025-08-25 -
江西MBD用什么工具
2025-08-25 -
海南autosar國(guó)產(chǎn)工具鏈MBD全流程解決方案
2025-08-25 -

陜西PID控制算法國(guó)產(chǎn)平臺(tái)
2025-08-25