自帶算法的ADAS(高級(jí)駕駛輔助系統(tǒng))前車防碰撞系統(tǒng)的工作原理,主要依賴于多種傳感器、復(fù)雜的算法以及車輛控制系統(tǒng)的緊密協(xié)作。
一、系統(tǒng)組成
ADAS前車防碰撞系統(tǒng)主要組成:包括毫米波雷達(dá)、激光雷達(dá)、單目或多目攝像頭等,用于實(shí)時(shí)收集車輛前方的位置、速度、距離等環(huán)境數(shù)據(jù)。對(duì)攝像頭采集的圖像數(shù)據(jù)進(jìn)行處理,包括自動(dòng)對(duì)焦、自動(dòng)曝光、顏色校正等。內(nèi)置高級(jí)算法,對(duì)傳感器收集的數(shù)據(jù)進(jìn)行深度分析,根據(jù)ECU的指令執(zhí)行相應(yīng)的動(dòng)作,發(fā)出警報(bào)。
二、工作原理
數(shù)據(jù)采集傳感器(如毫米波雷達(dá)、激光雷達(dá)、攝像頭)持續(xù)監(jiān)測(cè)車輛前方的道路環(huán)境,收集前方車輛的位置、速度、距離等關(guān)鍵信息。攝像頭捕捉前方道路和車輛的圖像,通過(guò)ISP進(jìn)行圖像處理,數(shù)據(jù)處理與算法分析ECU接收傳感器和ISP傳輸?shù)臄?shù)據(jù),運(yùn)用內(nèi)置的復(fù)雜算法進(jìn)行分析。聲光報(bào)警裝置會(huì)發(fā)出警報(bào)。
三、關(guān)鍵技術(shù)圖像識(shí)別
通過(guò)圖像處理算法識(shí)別前方車輛和車道線等信息。多種傳感器數(shù)據(jù)(如雷達(dá)測(cè)距、攝像頭圖像分析),精確計(jì)算與前方車輛的距離。基于當(dāng)前車輛和前方車輛的狀態(tài)數(shù)據(jù),預(yù)測(cè)未來(lái)一段時(shí)間內(nèi)兩車的相對(duì)位置變化,評(píng)估碰撞風(fēng)險(xiǎn)。根據(jù)碰撞風(fēng)險(xiǎn)的評(píng)估結(jié)果,制定并執(zhí)行相應(yīng)的控制策略,發(fā)出警報(bào)。
主動(dòng)安全預(yù)警系統(tǒng)車規(guī)級(jí)高性能處理器主機(jī)具備強(qiáng)大的計(jì)算能力,能夠支持復(fù)雜的算法和數(shù)據(jù)處理任務(wù).中國(guó)澳門AI主動(dòng)安全預(yù)警系統(tǒng)方案商
(下篇)8路AI360全景主機(jī)集成了多種先進(jìn)技術(shù)和功能,并展現(xiàn)出強(qiáng)大的可擴(kuò)展性。以下是對(duì)其豐富的集成功能和可擴(kuò)展性的詳細(xì)介紹:
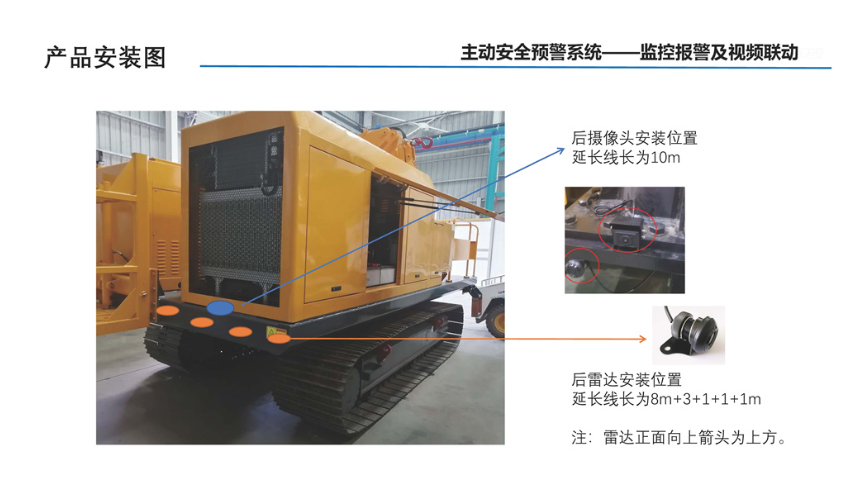
二、可擴(kuò)展性多攝像頭接入:8路AI360全景主機(jī)不僅支持8個(gè)全景攝像頭的接入,還可以接入其他用途的攝像頭,如前后雷達(dá)攝像頭、行車記錄儀攝像頭等。滿足了用戶在不同應(yīng)用場(chǎng)景下的需求,提升了系統(tǒng)的靈活性和實(shí)用性。硬件上預(yù)留了豐富的接口(如RS232、RJ45、以太網(wǎng)、CAN等),以及適配多種不同的視頻格式輸入、輸出。
這使得系統(tǒng)能夠與其他車載系統(tǒng)進(jìn)行無(wú)縫連接和集成,如導(dǎo)航系統(tǒng)、駕駛輔助系統(tǒng)等。系統(tǒng)已調(diào)試對(duì)接成功多種云平臺(tái)協(xié)議,支持將實(shí)時(shí)視頻數(shù)據(jù)、智能識(shí)別數(shù)據(jù)等傳輸?shù)竭h(yuǎn)程管理平臺(tái)或手機(jī)APP上。用戶可以隨時(shí)隨地查看車輛狀態(tài)、行駛軌跡、周邊環(huán)境等信息,實(shí)現(xiàn)遠(yuǎn)程監(jiān)控與管理。針對(duì)不同用戶的具體需求,8路AI360全景主機(jī)支持客制化開(kāi)發(fā)服務(wù)。用戶可以根據(jù)自己的需求定制特定的功能和性能參數(shù),以滿足特定的應(yīng)用場(chǎng)景和需求。
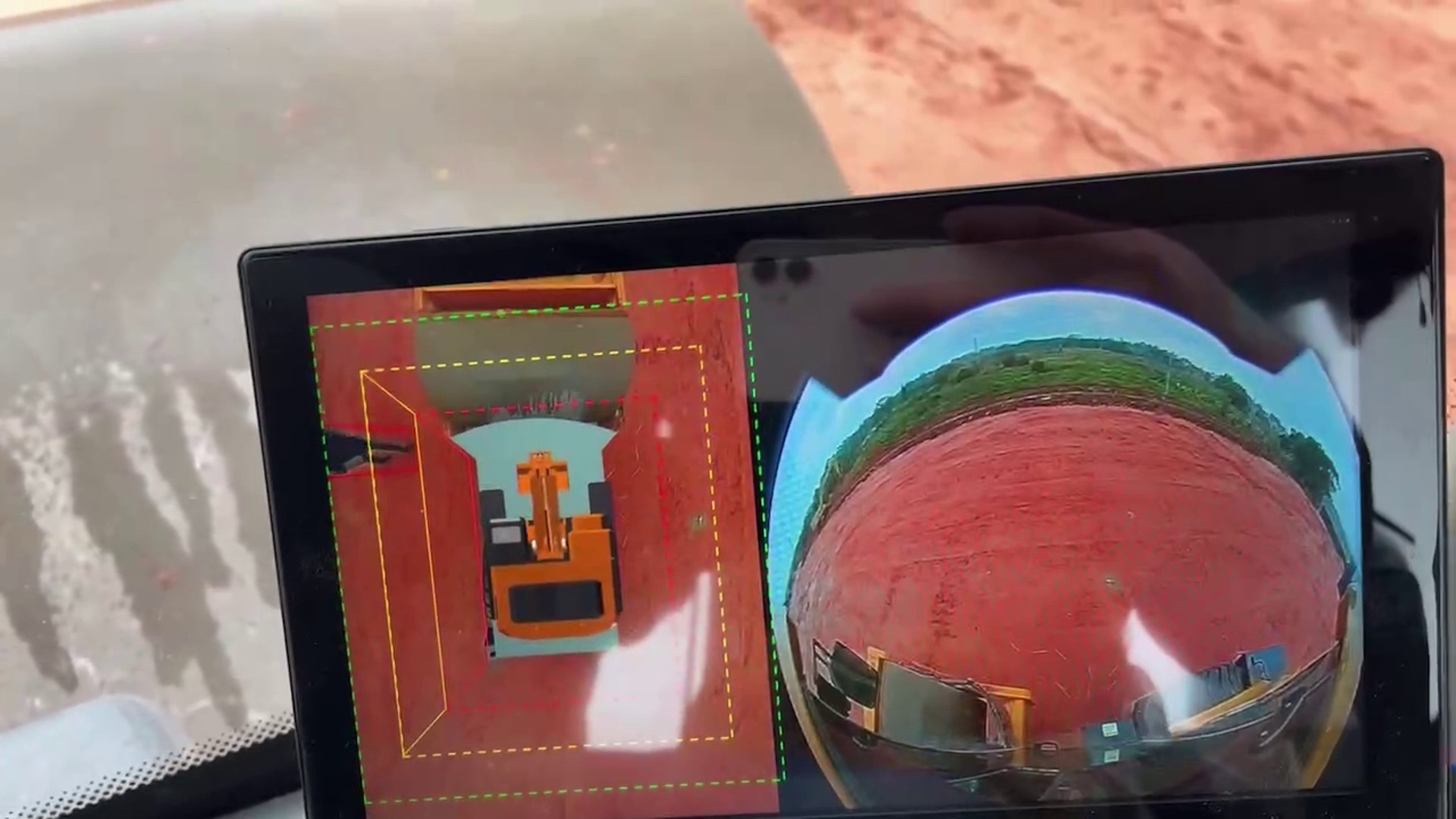
8路AI360全景主機(jī)不僅具備豐富的集成功能,如全景環(huán)視、視頻記錄存儲(chǔ)及回放、遠(yuǎn)程系統(tǒng)升級(jí)、智能識(shí)別與檢測(cè)以及主動(dòng)安全輔助等;展現(xiàn)強(qiáng)大的可擴(kuò)展性,如多攝像頭接入、豐富的接口、云平臺(tái)集成以及客制化開(kāi)發(fā)等。 礦卡主動(dòng)安全預(yù)警系統(tǒng)聯(lián)系方式視頻處理主機(jī)對(duì)接收到的視頻數(shù)據(jù)進(jìn)行處理,包括去噪,增強(qiáng),拼接等步驟,合成一個(gè)360度全景圖像.
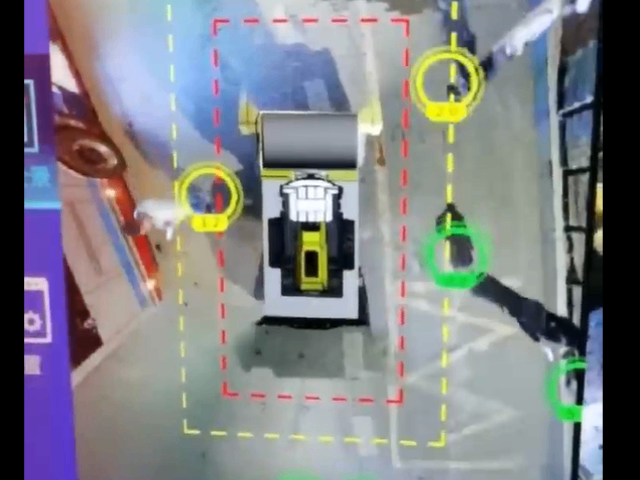
(下篇)360全景智防安全觸控一體機(jī)BSD盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng)是一種先進(jìn)的車輛安全輔助系統(tǒng),通過(guò)360環(huán)視的高清攝像頭不間斷地探測(cè)車輛前后左右盲區(qū)范圍內(nèi)的物體,并根據(jù)物體距離本車的遠(yuǎn)近程度劃分報(bào)警級(jí)別,通過(guò)觸控屏顯示障礙物距離并觸發(fā)聲光報(bào)警器發(fā)出預(yù)警。該系統(tǒng)功能的詳細(xì)闡述:
駕駛員可以通過(guò)觸控屏直觀地了解車輛周圍的情況。聲光預(yù)警:當(dāng)系統(tǒng)檢測(cè)到有物體進(jìn)入盲區(qū)并觸發(fā)報(bào)警時(shí),聲光報(bào)警器會(huì)立即發(fā)出預(yù)警信號(hào)。聲音提示和燈光閃爍相結(jié)合,能夠迅速吸引駕駛員的注意,提醒其注意安全。
四、其他輔助功能動(dòng)態(tài)車道偏離預(yù)警:在車輛行駛過(guò)程中,系統(tǒng)會(huì)實(shí)時(shí)監(jiān)測(cè)車輛是否偏離車道。當(dāng)車輛偏離車道時(shí),系統(tǒng)會(huì)發(fā)出警告,提醒駕駛員調(diào)整行駛方向。行車記錄:系統(tǒng)通常還具備行車記錄功能,能夠錄制車輛行駛過(guò)程中的視頻和音頻信息。這些信息可以用于事故追溯和責(zé)任判定。遠(yuǎn)程管理:部分高級(jí)系統(tǒng)還支持遠(yuǎn)程管理功能,車隊(duì)管理人員通過(guò)手機(jī)和電腦遠(yuǎn)程監(jiān)控車輛的狀態(tài)和報(bào)警信息,提高車隊(duì)的管理效率和安全性。
綜上所述,360全景智防安全觸控一體機(jī)BSD盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng)通過(guò)高清攝像頭、報(bào)警級(jí)別劃分、觸控屏顯示與聲光預(yù)警等功能的綜合運(yùn)用,為駕駛員提供了Q方位、實(shí)時(shí)的車輛安全輔助。
(專輯二)ONVIF協(xié)議與RTSP視頻流在360全景影像中的應(yīng)用原理密切相關(guān),它們共同為車載360全景影像系統(tǒng)提供了高效、標(biāo)準(zhǔn)化的視頻傳輸與控制方案。以下是詳細(xì)的應(yīng)用原理:
二、RTSP視頻流的作用實(shí)時(shí)流傳輸協(xié)議:RTSP(Real Time Streaming Protocol)是一種用于在互聯(lián)網(wǎng)上控制實(shí)時(shí)多媒體流傳輸?shù)膮f(xié)議。它允許客戶端控制多媒體播放器(如視頻監(jiān)控?cái)z像頭)的行為,如播放、暫停、停止和定位等。RTSP主要負(fù)責(zé)媒體流的控制和管理,但不直接傳輸音視頻數(shù)據(jù)。音視頻數(shù)據(jù)的實(shí)際傳輸通常通過(guò)RTP(Real-time Transport Protocol)等協(xié)議來(lái)實(shí)現(xiàn)。視頻流控制:在360全景影像系統(tǒng)中,RTSP協(xié)議用于建立和控制視頻流的傳輸。通過(guò)RTSP,客戶端可以請(qǐng)求服務(wù)器發(fā)送視頻流,并控制流的播放、暫停、停止等操作。RTSP提供了諸如OPTIONS、DESCRIBE、SETUP、PAUSE、TEARDOWN等方法,用于實(shí)現(xiàn)視頻流的會(huì)話建立、參數(shù)協(xié)商、流控制等功能。 主動(dòng)安全預(yù)警的云臺(tái)監(jiān)控管理系統(tǒng),對(duì)監(jiān)控區(qū)域進(jìn)行遠(yuǎn)程管理,如設(shè)置報(bào)警規(guī)則,調(diào)整監(jiān)控參數(shù)等.

(下篇)360全景智防安全觸控一體機(jī)是一種集成了多項(xiàng)先進(jìn)技術(shù)的高科技產(chǎn)品,以下是關(guān)于其高度集成4-6路全景拼接及BSD盲區(qū)監(jiān)測(cè)預(yù)警、4G全網(wǎng)通GPS定位功能的具體闡述:
提高安全性:BSD盲區(qū)監(jiān)測(cè)預(yù)警功能能夠明顯降低因盲區(qū)導(dǎo)致的交通事故風(fēng)險(xiǎn),提高駕駛安全性。
三、4G全網(wǎng)通GPS定位功能4G全網(wǎng)通:一體機(jī)內(nèi)置4G全網(wǎng)通模塊,支持各種4G網(wǎng)絡(luò)制式,確保在任何地方都能獲得穩(wěn)定的網(wǎng)絡(luò)連接。這使得一體機(jī)能夠?qū)崟r(shí)傳輸數(shù)據(jù)、接收更新和進(jìn)行遠(yuǎn)程控制等操作。GPS定位:通過(guò)內(nèi)置的GPS模塊,一體機(jī)能夠?qū)崟r(shí)獲取車輛的地理位置信息。這些信息可以用于導(dǎo)航、跟蹤和監(jiān)控等目的。遠(yuǎn)程監(jiān)控與管理:結(jié)合4G全網(wǎng)通和GPS定位功能,一體機(jī)可以實(shí)現(xiàn)遠(yuǎn)程監(jiān)控和管理。例如,企業(yè)可以實(shí)時(shí)監(jiān)控車輛的行駛軌跡、速度和位置等信息,以便進(jìn)行車隊(duì)管理和調(diào)度。同時(shí),家長(zhǎng)也可以利用這些功能來(lái)監(jiān)控孩子的行車安全。
綜上所述,360全景智防安全觸控一體機(jī)通過(guò)高度集成4-6路全景拼接、BSD盲區(qū)監(jiān)測(cè)預(yù)警和4G全網(wǎng)通GPS定位等功能,為駕駛員提供了Q方位、多層次的駕駛輔助和安全保障。這些功能的集成使得一體機(jī)在提升駕駛安全性、降低交通事故風(fēng)險(xiǎn)方面具有重要意義。 叉車AI防撞預(yù)警系統(tǒng)內(nèi)置先進(jìn)的AI處理芯片,具備強(qiáng)大的數(shù)據(jù)處理能力,能夠?qū)崟r(shí)分析視頻圖像.福建物流車主動(dòng)安全預(yù)警系統(tǒng)
叉車專YONG智能一體機(jī),實(shí)時(shí)記錄視頻數(shù)據(jù),包括時(shí)間,速度,位置等關(guān)鍵信息,為事故追溯和責(zé)任劃分提供有力證據(jù).中國(guó)澳門AI主動(dòng)安全預(yù)警系統(tǒng)方案商
(上篇)主動(dòng)安全一體機(jī)主機(jī)的技術(shù)參數(shù)通常涵蓋多個(gè)方面,包括硬件規(guī)格、輸入輸出接口、功耗、工作溫度等。以下是根據(jù)參考文章整理的主動(dòng)安全一體機(jī)主機(jī)的一些主要技術(shù)參數(shù):1.硬件規(guī)格CPU:內(nèi)核采用ARMCortex-A7雙核,主頻≥,部分高DUAN型號(hào)可能采用更強(qiáng)大的處理器,如第11代英特爾?酷睿?i5-11400。內(nèi)存:通常配備1GB或更高容量的內(nèi)存,以支持多任務(wù)處理和流暢運(yùn)行。存儲(chǔ):內(nèi)置8GBeMMC閃存或更高JI別的SSD硬盤(pán),部分產(chǎn)品支持機(jī)械硬盤(pán)/SSD,ZUI大可達(dá)2T。顯示:部分一體機(jī)配備觸控一體屏,分辨率可達(dá)1920x720或更高,如1920*1080IPS,支持多通道同步音視頻回放。2.輸入輸出接口視頻輸入:支持4路+(預(yù)留)2路AHD信號(hào)接入,部分產(chǎn)品支持高達(dá)6路1080P視頻輸入。視頻輸出:支持視頻顯示分辨率如1280x720,60fps,部分產(chǎn)品提供VGA或HDMI輸出。音頻:通常具備1通道錄YIN和1通道回放功能。開(kāi)關(guān)量檢測(cè):支持多路開(kāi)關(guān)量輸入和輸出,如4路、11路輸入,1路輸出等。CAN接口:至少提供1路CAN。串口:預(yù)留1路TTL串口或更多。網(wǎng)絡(luò)接口:支持4G全網(wǎng)通通信,部分產(chǎn)品預(yù)留GPS、北斗雙模定WEI。USB接口:提供USB,用于數(shù)據(jù)傳輸和設(shè)備連接。中國(guó)澳門AI主動(dòng)安全預(yù)警系統(tǒng)方案商