(上篇)叉車防撞預警系統的后臺管理實現,主要依賴于一系列科學的技術手段和管理策略,以確保系統的穩定運行和高效管理。
一、系統架構設計數據采集層:通過安裝在叉車上的各種傳感器(如攝像頭、毫米波雷達、UWB無線通信設備等)實時采集叉車周圍環境的數據,包括人員、車輛的位置、速度等信息。數據處理層:利用AI邊緣計算、深度學習等先進技術,對采集到的數據進行快速處理和分析,識別出潛在的危險情況,并生成相應的預警信號。決策控制層:根據處理層的結果,決策控制層會發出相應的控制指令,如限制車速、發出聲光報警等,以避免碰撞事故的發生。后臺管理層:作為整個系統的HEXIN,后臺管理層負責數據的存儲、分析、展示以及系統的配置和維護。
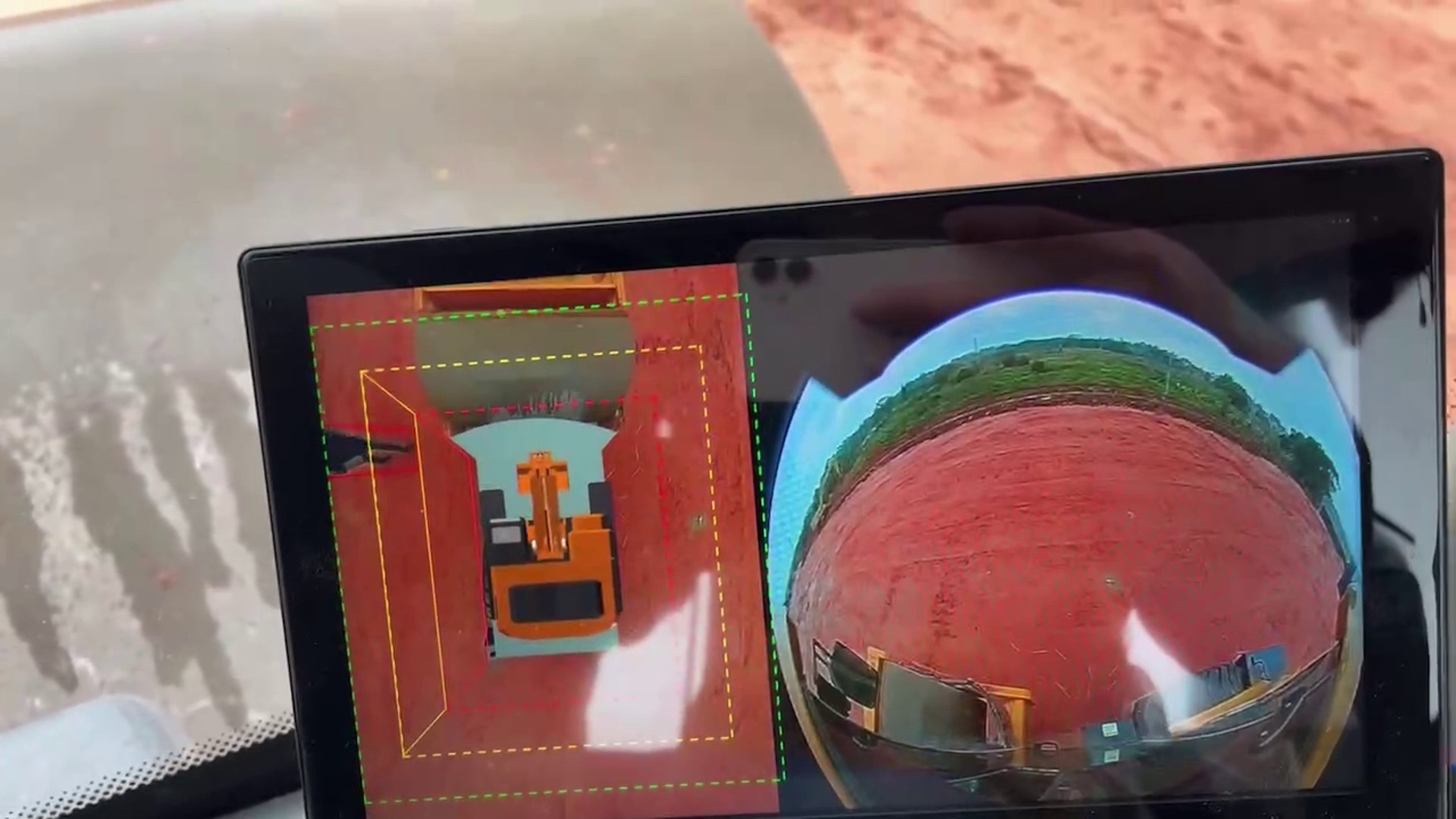
二、后臺管理功能實現數據存儲與分析:實時存儲來自前端設備的數據,包括視頻、雷達數據等。對數據進行深度分析,識別出叉車作業中的潛在風險,如超速、違規操作等。提供數據報表和可視化界面,幫助管理人員直觀了解叉車作業情況。系統配置與維護:支持遠程配置系統參數,如預警距離、報警閾值等。實時監控前端設備的運行狀態,及時發現并處理設備故障。提供系統升級和補丁管理功能,確保系統始終保持ZUIXIN狀態。 主動安全一體機的主要功能:360全景影像4路或6路拼接+BSD盲區預警+后臺實時遠程監控管理.廣西SUV主動安全預警系統開發平臺
(專輯二)ONVIF協議與RTSP視頻流在360全景影像中的應用原理密切相關,它們共同為車載360全景影像系統提供了高效、標準化的視頻傳輸與控制方案。以下是詳細的應用原理:
二、RTSP視頻流的作用實時流傳輸協議:RTSP(Real Time Streaming Protocol)是一種用于在互聯網上控制實時多媒體流傳輸的協議。它允許客戶端控制多媒體播放器(如視頻監控攝像頭)的行為,如播放、暫停、停止和定位等。RTSP主要負責媒體流的控制和管理,但不直接傳輸音視頻數據。音視頻數據的實際傳輸通常通過RTP(Real-time Transport Protocol)等協議來實現。視頻流控制:在360全景影像系統中,RTSP協議用于建立和控制視頻流的傳輸。通過RTSP,客戶端可以請求服務器發送視頻流,并控制流的播放、暫停、停止等操作。RTSP提供了諸如OPTIONS、DESCRIBE、SETUP、PAUSE、TEARDOWN等方法,用于實現視頻流的會話建立、參數協商、流控制等功能。 江蘇物聯網主動安全預警系統推薦廠家RTSP協議支持多種認證方式,如基本認證,摘要認證,OAuth認證和TLS/SSL認證等,以保護流媒體服務器資源的安全.
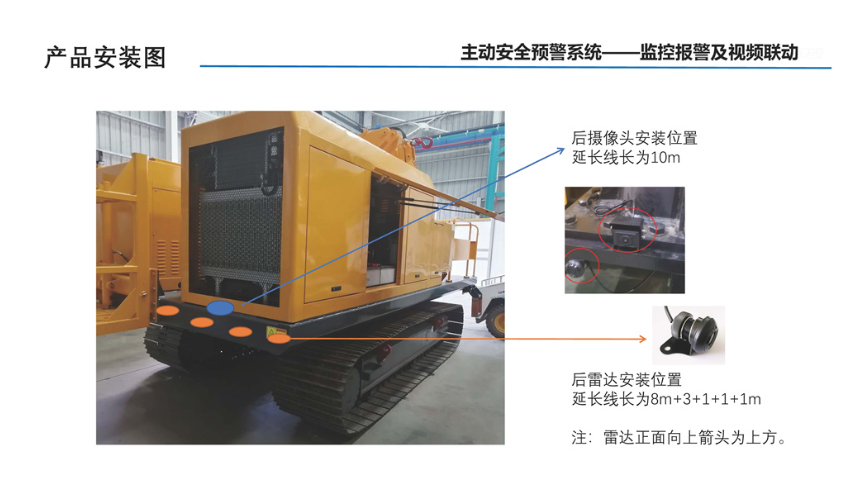
(中篇-共上中下篇)叉車360全景影像系統的主動安全預警方案是一種高效、實用的叉車安全監控與防護手段,旨在通過*FANNGWEI、高清的視頻監控和實時預警功能,XIANZHU提升叉車操作的安全性和效率。以下是對該方案主要內容的詳細闡述:二、主動安全預警功能*FANNGWEI視角監控:通過安裝在叉車周圍的多個攝像頭,實現對叉車周圍環境的*FANNGWEI實時監控,不留死角,有效解決了叉車操作中的視覺盲區問題。高清畫質識別:采用高清攝像頭采集視頻圖像,畫質清晰細膩,能夠清楚地識別出周圍的人和物,提高了預警的準確性和可靠性。實時預警提示:當智能預警系統檢測到盲區內的行人或障礙物處于危險區域時,會通過顯示屏同時語音和色彩提示司機車輛周邊情況,使司機能夠及時做出反應,避免碰撞事故的發生。車外聲光報警:車外配有大功率聲光報警器,當系統檢測到潛在危險時,會發出警示光和聲音提醒車輛周邊的行人和其他車輛注意安全,進一步增強了預警效果。
自帶算法的ADAS(高級駕駛輔助系統)前車防碰撞系統的工作原理,主要依賴于多種傳感器、復雜的算法以及車輛控制系統的緊密協作。
一、系統組成
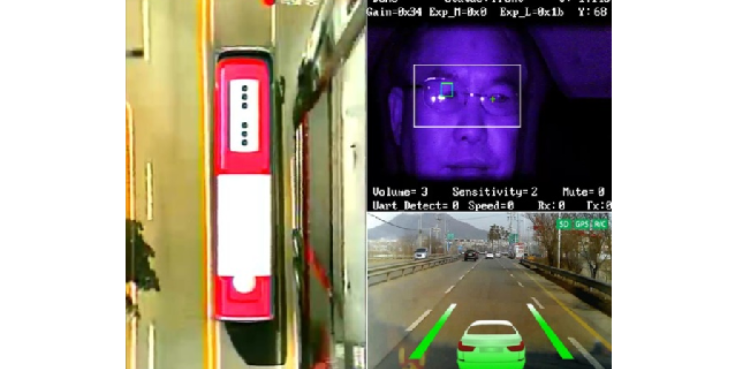
ADAS前車防碰撞系統主要組成:包括毫米波雷達、激光雷達、單目或多目攝像頭等,用于實時收集車輛前方的位置、速度、距離等環境數據。對攝像頭采集的圖像數據進行處理,包括自動對焦、自動曝光、顏色校正等。內置高級算法,對傳感器收集的數據進行深度分析,根據ECU的指令執行相應的動作,發出警報。
二、工作原理
數據采集傳感器(如毫米波雷達、激光雷達、攝像頭)持續監測車輛前方的道路環境,收集前方車輛的位置、速度、距離等關鍵信息。攝像頭捕捉前方道路和車輛的圖像,通過ISP進行圖像處理,數據處理與算法分析ECU接收傳感器和ISP傳輸的數據,運用內置的復雜算法進行分析。聲光報警裝置會發出警報。
三、關鍵技術圖像識別
通過圖像處理算法識別前方車輛和車道線等信息。多種傳感器數據(如雷達測距、攝像頭圖像分析),精確計算與前方車輛的距離。基于當前車輛和前方車輛的狀態數據,預測未來一段時間內兩車的相對位置變化,評估碰撞風險。根據碰撞風險的評估結果,制定并執行相應的控制策略,發出警報。
毫米波雷達具有很高的探測精確度,分辨率和穿透力,在復雜環境精確探測出車輛周圍的人員設備和其他障礙物.

(專輯二)主動安全預警系統4G云端平臺的后臺管理實現是綜合性的過程。以下是對該過程的具體闡述:
四、數據監控與報警:實時收集設備傳輸的數據,并進行預處理和分析。通過算法模型對數據進行處理,判斷是否存在安全隱患或異常情況。設置報警閾值和規則,當檢測到異常情況時自動觸發報警機制。報警信息可以通過短信、郵件、APP推送等方式通知相關人員進行處理。同時,支持報警記錄的查詢和導出功能,方便后續分析和處理。五、系統維護與升級:定期對系統進行巡檢和維護,確保各項功能的正常運行。對系統日志進行監控和分析,及時發現并處理潛在問題。根據業務需求和技術發展不斷對系統進行升級和優化。升級過程中需要確保數據的完整性和安全性,避免數據丟失或泄露。
六、安全與穩定性保障:加強網絡安全防護,采用防火墻、入侵檢測系統等措施防止惡意攻擊。對敏感數據進行加密存儲和傳輸,確保數據的安全性。通過負載均衡、容災備份等技術手段確保系統的穩定性和可靠性。在發生故障時能夠迅速恢復服務并減少損失。
主動安全預警系統4G云端平臺的后臺管理實現需要綜合考慮系統架構設計、用戶與權限管理、設備管理、數據監控與報警、系統維護與升級以及安全與穩定性保障等方面。 主動安全預警系統通常配備多種傳感器,如攝像頭,雷達,激光雷達等,這些傳感器提供的數據需要進行融合和處理.四川物聯網主動安全預警系統廠家供應
通過4G網絡傳輸的視頻流,操作人員可以實時看到工業機器人的工作狀態和周圍環境,并根據需要進行操控.廣西SUV主動安全預警系統開發平臺
4G 360全景影像應用于船舶領域的技術原理主要基于以下幾個關鍵環節:
一、攝像頭布局與圖像采集
在船舶的不同位置(如船頭、船尾、船舷兩側等)安裝多個高清攝像頭,廣角攝像頭覆蓋船舶周圍的360度視野范圍。攝像頭實時捕捉船舶周圍的圖像,將這些圖像信號通過有線或無線方式傳輸至中央處理單元。
二、圖像處理與拼接圖像處理:
中央處理單元接收來自攝像頭的圖像信號,進行一系列處理,包括圖像增強、濾波、去噪等,以提高圖像質量。利用先進的圖像拼接算法,將捕捉到的圖像進行無縫拼接,形成360度全景圖像。算法會考慮攝像頭之間的位置關系、角度差異以及圖像重疊部分,以確保拼接后的圖像準確、連貫。
三、實時傳輸與顯示4G傳輸:
利用4G通信技術,實時傳輸至顯示設備。4G網絡的高速傳輸特性確保了圖像的流暢性和實時性。顯示設備接收展示360度全景圖像。
四、智能分析與預警智能分析:
系統自動識別并跟蹤船舶周圍的船只、浮標、障礙物等,分析其行為模式,并預測潛在風險。檢測到潛在風險時(如其他船只突然靠近、障礙物進入航道等),會立即發出警報。
五、數據記錄與回放數據記錄:
系統能記錄船舶航行過程中的所有圖像和數據,包括實時視頻、圖像拼接結果、智能分析結果等。 廣西SUV主動安全預警系統開發平臺