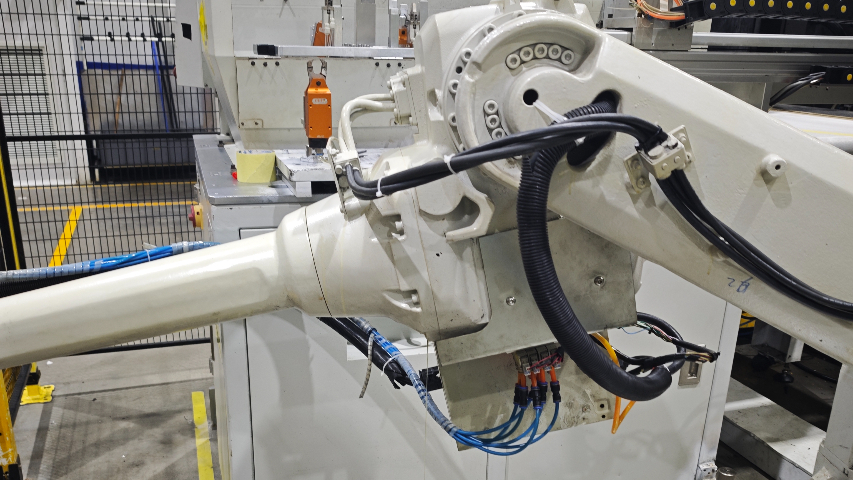
確保物料在不同環節間順暢流轉;以及各類傳感器,用于實時監測機器人、車床及物料的狀態,為整個系統的安全穩定運行提供保障。工作原理物料識別與定位:在料倉處設置先進的視覺識別系統,對放置其中的開關元器件坯料進行精確識別與定位。利用先進的圖像算法,快速獲取坯料的形狀、尺寸及位置信息,并將這些數據傳輸至機器人控制系統。機器人取料與上料:機器人1600依據視覺系統反饋的信息,規劃便捷運動路徑,移動至料倉抓取坯料。其末端執行器根據坯料的形狀和尺寸,自動調整抓取力度與方式,確保抓取牢固。隨后,機器人迅速將坯料運送至機加工車床的裝夾位置,精確完成上料操作。車床加工:機加工車床在接收到上料完成信號后,立即啟動加工流程。依據預先設定的程序,對坯料進行高精度的切削、鉆孔等加工操作,將坯料轉化為符合要求的開關元器件成品。機器人下料與卸料:加工完成后,車床發出信號,機器人1600再次動作,準確抓取成品并將其放置到指定的傳輸軌道或成品料倉。在整個過程中,機器人的動作與車床的加工節奏緊密配合,實現高效、連續的自動上下料作業。安川機器人電纜管理優化,避免線路纏繞,有問題找浙江展杭,延長設備使用壽命。衢州ABB機器人維修
食品加工上下料生產線的機器人,需要在潮濕、酸堿環境下搬運食品原料和成品,其機械結構易被腐蝕,密封部件老化速度快。某食品企業的上下料機器人運行 2 年后,出現部件生銹、動作不靈活的問題。智小航維護人員對機器人進行多方面拆解,更換耐腐蝕的不銹鋼零部件,使用食品級密封膠對密封部位進行重新處理。針對潮濕環境,對電氣控制系統進行防潮改造,加裝防水接線盒。每季度進行深度清潔和防腐保養,使機器人使用壽命從 4 年延長至 7 年,設備穩定性大幅提升。三明ABB660機器人售后熱線檢測機械臂的防護罩完整性,防止因破損失去防護作用,有問題找浙江展杭,及時修復更換。
在食品飲料碼垛生產線,工業機器人需頻繁抓取包裝瓶、紙箱等產品,日均完成超 2 萬次碼垛動作,機械臂關節和伺服電機長期處于高負荷運轉狀態。某飲料廠的碼垛機器人運行 2 年后,出現動作遲緩、定位偏差問題,導致碼垛效率下降 20%。智小航維護團隊使用振動頻譜分析儀檢測關節軸承,發現諧波減速器齒輪磨損嚴重。團隊更換高度合金齒輪,注入高粘度抗磨潤滑脂,并對伺服電機進行溫升測試和絕緣檢測。同時,優化機器人運動軌跡算法,減少不必要的慣性沖擊。經過系統化維護,該機器人使用壽命從 5 年延長至 8 年,故障率降低 65%,碼垛效率恢復并提升 15%。
ABBFlexPendant示教器采用?圖形化交互設計?,配備8英寸高靈敏度觸摸屏,支持多種編程模式:?軌跡編程?通過可視化界面直接繪制線性/圓弧路徑,系統自動生成RAPID代碼集成"單步執行"調試功能,可逐指令檢查運動軌跡與IO信號狀態?拖拽示教(Lead-throughTeaching)?在力控模式下(<50N啟動力),操作人員可直接拖動機器人末端至目標位姿系統以100Hz采樣率記錄關節角度,自動優化為平滑運動指令?快速應用模板?預置焊接、碼垛等20+行業工藝包,支持參數化快速配置該方案使非專業人員也能在30分鐘內完成基礎編程,在汽車零部件柔性產線實測顯示:新程序平均創建時間從4小時縮短至2小時軌跡修正效率提升80%(傳統點動模式需重復定位)特別適合醫療器材、航空航天等領域的小批量(<50件)定制化生產系統符合ISO10218安全標準,所有操作數據實時同步至ABBAbility?云端備份。清潔保養能防止粉塵堆積影響散熱,保障重要部件的正常工作溫度。

在新能源電池制造的注液工序中,工業機器人以 ±0.01ml 的超高精度完成電解液注入。由于電解液具有強腐蝕性且易燃易爆,設備一旦出現密封失效或計量偏差,不 會影響電池性能,還存在安全隱患。智小杭針對新能源行業制定專項售后服務,配備專業的防爆檢測設備和耐腐蝕部件更換工具。當某鋰電池生產企業的注液機器人出現微量滲漏時,智小杭售后團隊 4 小時內抵達現場,通過氦質譜檢漏儀 精確定位漏點,更換密封件并對管路系統進行壓力測試,同時對設備進行多方面防腐處理。此外,智小杭還提供定期的設備安全巡檢,利用紅外熱成像技術檢測電氣系統發熱情況,提前發現潛在風險,保障新能源電池生產線安全穩定運行。對機械臂的焊接部位進行檢查,避免因裂縫導致結構損壞,浙江展杭修復焊接,加固設備結構。衢州ABB2600機器人保養
安川SCARA機器人校準服務,確保運動精度達標,有問題找浙江展杭,延長設備使用壽命。衢州ABB機器人維修
一旦有人體不慎闖入危險區域,機器人會瞬間響應,即刻停止運行,多方位保障學生的人身安全。實訓臺上對工作區域進行了清晰明了的劃分,涵蓋零部件存放區、組裝操作區、成品暫存區等,學生可依照既定流程,有條不紊地開展組裝工作。工作原理零部件準備:將鼠標的外殼、電路板、按鍵、滾輪等各類零部件,依據不同類別,有序放置在實訓臺的零部件存放區。每個零部件均有專屬的固定位置,并配備醒目標識,方便機器人通過內置的視覺識別系統快速捕捉、精確識別,進而實現精確抓取。機器人協作組裝:臺機器人主要承擔抓取鼠標外殼的任務。它借助內置的**視覺識別系統,能夠在瞬間精確定位外殼的空間位置與姿態,隨后憑借機械手臂,以極高的精度將外殼穩穩放置在組裝操作區的**點位。第二臺機器人則專注于抓取電路板、按鍵等內部零部件,依據預設的精密程序,精確調控力度與角度,將這些零部件逐一牢固安裝到鼠標外殼內部。兩臺機器人依托實時通信技術與精妙的協同算法,實現動作的無縫銜接與緊密配合。例如,當***臺機器人完成外殼放置動作后,會即刻向第二臺機器人發送信號,第二臺機器人接收到信號后,迅速啟動零部件安裝操作,有效規避了相互等待與動作相沖。衢州ABB機器人維修
在CNC加工智能化升級中,桁架機器人通過?雙夾爪協同抓取技術?實現工件快速裝卸,其伺服驅動系統采用齒...
【詳情】機器人型號:4600配合康耐視3D視覺對小車內的產品進行有序抓取放置到輸送線上。工作原理視覺識...
【詳情】機器人型號:4600配合康耐視3D視覺對小車內的產品進行有序抓取放置到輸送線上。工作原理視覺識...
【詳情】陶瓷制品上下料生產線的機器人,在搬運過程中需要頻繁調整姿態,其關節部位的軸承和傳動齒輪易磨損。某陶瓷...
【詳情】監控確保物料在不同環節間順暢流轉;以及各類傳感器,用于實時監測機器人、車床及物料的狀態,為整個...
【詳情】金屬板材上下料生產線的搬運機器人,在高溫、粉塵環境下工作,其電機、減速機和導軌容易受到污染和磨損。某...
【詳情】防爆工業機器人化工原料的自動化輸送環節,在易燃易爆環境中安全作業,對設備的安全性和穩定性要求極高。為...
【詳情】項目背景與目標背景:杭州某**積極投身于智能制造教育的前沿探索,精心開展雙機協作鼠標組裝工作站...
【詳情】在工業機器人日常使用中,定期保養能有效降低工業機器人突發故障概率。據統計,未執行預防性維護的機器人系...
【詳情】在工業機器人日常使用中,定期保養能有效降低工業機器人突發故障概率。據統計,未執行預防性維護的機器人系...
【詳情】ABBIRB2600四軸機器人憑借其?高速穩定性?與?緊湊結構設計?,在簡單重復作業場景中展現出...
【詳情】