
無人機在農(nóng)業(yè)領(lǐng)域能夠?qū)崿F(xiàn)高效率的施肥、播種等操作。但是不同的作業(yè)環(huán)境對于無人機的工作性能要求不一樣,同樣的方案在平原地區(qū)適用,在高原地區(qū)就不行。因此針對于特殊作業(yè)環(huán)境需要制定不同的智慧化方案。像青藏高原這樣地貌復雜、低氣壓、大溫差的特點,參與智能化工作的各個部件需要符合這樣作業(yè)環(huán)境特點的性能要求。不...
AI智能基本參數(shù)
- 品牌
- 慧視科技
- 型號
- 可定制
- 輸出信號
- 可定制
- 制作工藝
- 可定制
- 材質(zhì)
- 可定制
- 材料物理性質(zhì)
- 可定制
AI智能企業(yè)商機
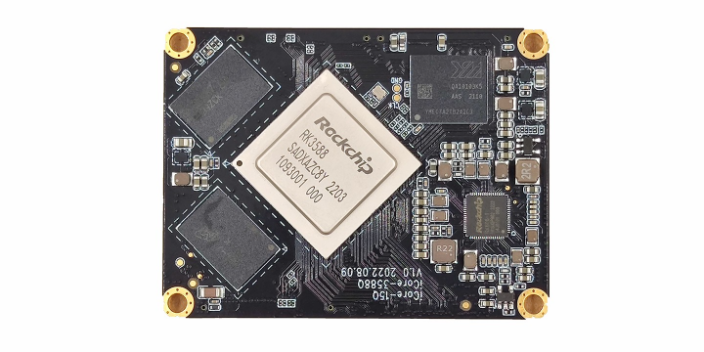
這樣的無人機智慧“眼”可以通過搭載吊艙實現(xiàn),吊艙內(nèi)置各種規(guī)格的攝像機,能夠?qū)崿F(xiàn)多角度觀察。而智能化則可以在吊艙的基礎(chǔ)上植入高性能AI圖像處理板。圖像處理板能夠?qū)z像機獲取的圖像進行AI智能分析,這樣無人機就能夠自動識別缺陷,然后進行信息留存、回傳。在這個領(lǐng)域,成都慧視光電可以根據(jù)需求進行多接口圖像處理板的定制,選擇成都慧視開發(fā)的RK3588系列圖像處理板,支持選擇SDI、CVBS、LVDS、USB、cameralink等接口。RK3588擁有6.0TOPS的算力,能夠在各種復雜環(huán)境進行穩(wěn)定工作。板卡和識別算法的強強聯(lián)合下,無論白天黑夜,無人機都可以實現(xiàn)自助巡檢,就不需要過多的人工參與。也是一種降本增效的舉措。如何提升無人機識別跟蹤的精度?智慧監(jiān)獄AI智能監(jiān)控
AI智能
智慧城市的建設中,需要用到智慧攝像頭,這些攝像頭與傳統(tǒng)的不一樣,它們能夠模擬人眼進行視覺處理。主要是在攝像頭中植入高性能的AI圖像處理板,這些板卡在定制算法的賦能下,通過對視野內(nèi)的圖像特征的提取分析,就能夠?qū)ξ矬w具備動態(tài)跟蹤處理已經(jīng)后續(xù)的識別分析能力。復雜的識別場景中,板卡的性能和AI算法的能力十分關(guān)鍵。旗艦級的圖像處理板都是具有工業(yè)級的處理能力,在這樣的環(huán)境下才能更好地工作,能夠更快處理海量數(shù)據(jù),而算法的能力則決定著處理這些信息的精度。智慧監(jiān)獄AI智能監(jiān)控FPV跟蹤算法用SpeedDP幫助提升精度。

隨著生活品質(zhì)的提升,現(xiàn)在無論是企業(yè)還是個人都對智能化的需求有所提升,這就對于攝像頭提出了新的要求。現(xiàn)在市面上的傳統(tǒng)攝像頭都只具備記錄功能,受限于鏡頭的視野范圍,就算可以轉(zhuǎn)動也必須是手動操作,尚不能實現(xiàn)自動化。但在智慧安防等領(lǐng)域,如果攝像頭能夠?qū)崿F(xiàn)自動化轉(zhuǎn)動,那將進一步提升安防水準。自動轉(zhuǎn)動并不是目的,它的深層需求是需要對視野目標進行鎖定跟蹤,從而操控鏡頭轉(zhuǎn)動。這就需要攝像頭智能化。攝像頭需求識別出現(xiàn)在鏡頭的物體。
夏季,為了消減酷暑的炎熱,下水消暑成了老老少少的選擇,這也就給溺水事故埋下了隱患。以前,人工巡視雖然能夠起到一定作用,但是仍不能避免時間差帶來的弊端,每當發(fā)現(xiàn)后可能就為時已晚。而利用無人機,則可以開展不間斷、高密度、大范圍的巡視工作,其靈活機動的特點在巡湖巡河中十分高效。無人機搭載吊艙后升空,能夠看得更遠、更清晰,并且能夠輕松飛到一些盲區(qū)進行巡視。如果只是搭載吊艙仍屬于手動巡視的一種。如果要實現(xiàn)更加智能化的巡視,則可以在無人機光電吊艙的基礎(chǔ)上定制植入具備智能識別檢測的AI圖像跟蹤板,板卡在定制的對“人”的識別算法的賦能下,就能夠?qū)拥纼?nèi)、靠近河道的人進行自動識別跟蹤,一旦發(fā)現(xiàn)有人靠近水域出現(xiàn)涉水等行為,無人機就可以主動靠近,并通過人工喊話、大喇叭等形式對相關(guān)人員進行勸導。SpeedDP能夠節(jié)約大量的圖像標注時間。

多目標跟蹤是指在連續(xù)的圖像中,通過目標檢測算法識別出每一幀中的目標,并在時間上跟蹤它們的位置和狀態(tài)。但目標會不斷發(fā)生尺度、形變、遮擋等變化,而且還會有目標出現(xiàn)和消失的情況,再加上視頻采集端的相機所處環(huán)境可能受到外界影響導致抖動的情況(例如無人機高空檢測),就會給多目標跟蹤造成一定的困難。由于我們不能控制目標,所以只能從視頻采集端維護跟蹤的穩(wěn)定性。因此,成都慧視針對于多目標檢測跟蹤抖動丟失的優(yōu)化方法是:1.改進目標檢測,使用更加魯棒的目標檢測算法。2.增強特征描述,利用深度學習提取更高級別的語義特征,這些特征對于小范圍內(nèi)的視角變化具有更好的不變性3.改進運動模型,在算法中加入對攝像頭運動的估計,通過補償攝像頭運動來減小目標真實運動與預測之間的差距。4.數(shù)據(jù)關(guān)聯(lián)策略,設計更靈活的數(shù)據(jù)關(guān)聯(lián)算法,允許更大的距離閾值來匹配候選目標。小目標識別算法找成都慧視定制。湖南定制AI智能圖像處理
AI算法訓練幫助工具SpeedDP。智慧監(jiān)獄AI智能監(jiān)控
在這些小型飛行器自主避障飛行中,算法的性能很關(guān)鍵,他能幫助規(guī)劃路線,識別障礙物。為了滿足這樣小型化飛行器的需求,成都慧視開發(fā)了同樣是小型化體積的AI圖像處理板Viztra-LE026,這塊板卡采用了瑞芯微高性能芯片RV1126,體積小、功耗低,用在小型無人機上不會過多增加其負擔。而4和處理器,支持INT8和INT16,能夠輸出比較大2.0TOPS的算力,足以滿足在復雜環(huán)境中快速進行識別檢測。
此外,成都慧視推出的深度學習算法開發(fā)平臺還能夠針對算法進行模型訓練,通過大量的訓練來提升算法性能。 智慧監(jiān)獄AI智能監(jiān)控
與AI智能相關(guān)的文章

專業(yè)AI智能廠家
- 電力運維AI智能煙霧識別 2025-08-25
- 智慧城市AI智能算法分析軟件 2025-08-25
- 湖南定制AI智能廠家 2025-08-25
- 湖南深度學習AI智能圖像處理 2025-08-25
- 安徽應急救援AI智能高效處理 2025-08-25
- 研發(fā)AI智能目標跟蹤 2025-08-24
- 安徽智慧城市AI智能減員增效 2025-08-22
- 江西AI智能視覺 2025-08-12
- 云南電力巡檢AI智能智能方案 2025-08-10
- 甘肅視頻識別AI智能人臉識別 2025-08-04
- 重慶開發(fā)AI智能廠家 2025-08-04
- 視頻識別AI智能專業(yè)方案 2025-08-03
與AI智能相關(guān)的產(chǎn)品




與AI智能相關(guān)的新聞
-
吉林電力運維AI智能方案** 2025-08-02 10:12:27物聯(lián)網(wǎng)與人工智能的融合是一個多維度的技術(shù)整合過程,涉及數(shù)據(jù)的收集、分析和智能決策。這一融合的基礎(chǔ)在于如何有效地利用物聯(lián)網(wǎng)設備收集的海量數(shù)據(jù),并借助人工智能技術(shù)進行深入分析和應用。物聯(lián)網(wǎng)設備,包括各種傳感器和執(zhí)行器,是數(shù)據(jù)收集的前線。它們能夠?qū)崟r監(jiān)測環(huán)境參數(shù)、設備狀態(tài)和用戶行為,生成大量數(shù)據(jù)。這些數(shù)據(jù)...
-
人工智能AI智能算法分析廠家 2025-08-02 13:03:02RK3588作為瑞芯微國產(chǎn)化旗艦級芯片,用在目標跟蹤領(lǐng)域,通常情況下跟蹤幀率都在50Hz左右,這已經(jīng)足夠滿足大多數(shù)應用領(lǐng)域的需求。但在許多特殊領(lǐng)域,如軍備、邊防,高幀頻的視頻輸出能夠在極短的時間內(nèi)捕捉到更多的畫面,實現(xiàn)高速動態(tài)場景的連續(xù)拍攝。高幀頻的目標跟蹤則能夠獲得更多的目標細節(jié),便于做出下一步判...
-
陜西深度學習AI智能算法 2025-08-02 03:04:30新疆地緣遼闊、日照豐富,因此是我國光伏儲能發(fā)達的區(qū)域之一。為了保障光伏基地的正常運作,周期性的巡檢必不可少,傳統(tǒng)模式下需要人工一步一個腳印走出來,隨著現(xiàn)在無人機的廣落地應用,這種大面積大范圍的巡檢也迎來了效率的飛躍。光伏基地每隔一段地方就會有一個鐵塔,這些“駐塔式”機巢就是無人機的“巢穴”,無人機從...
-
云南智慧工地AI智能算法分析平臺 2025-08-02 06:03:14這樣的無人機智慧“眼”可以通過搭載吊艙實現(xiàn),吊艙內(nèi)置各種規(guī)格的攝像機,能夠?qū)崿F(xiàn)多角度觀察。而智能化則可以在吊艙的基礎(chǔ)上植入高性能AI圖像處理板。圖像處理板能夠?qū)z像機獲取的圖像進行AI智能分析,這樣無人機就能夠自動識別缺陷,然后進行信息留存、回傳。在這個領(lǐng)域,成都慧視光電可以根據(jù)需求進行多接口圖像處...
與AI智能相關(guān)的問題
新聞資訊
產(chǎn)品推薦
-
吉林視頻目標檢測
2025-08-27 -

低壓線目標跟蹤互惠互利
2025-08-26 -

湖北如何目標跟蹤
2025-08-26 -
湖北實時目標檢測
2025-08-26 -

云南專業(yè)圖像標注應用
2025-08-26 -

無源目標跟蹤售后服務
2025-08-26 -
貴州銀行視頻壓縮與傳輸提供商
2025-08-26 -

河北目標檢測多少錢
2025-08-26 -

青海目標跟蹤設備
2025-08-26