- 產地
- 上海
- 品牌
- 恩鳳
- 型號
- 齊全
- 是否定制
- 是
EAC58C10-GS6XPCR-8192,宜科,最常見的編碼器類型是旋轉編碼器和線性編碼器。旋轉編碼器通常用于測量機器人的關節位置,以及測量車輛和船只的轉向角度。線性編碼器通常用于測量運動平臺的位置和速度。旋轉編碼器和線性編碼器可以分為絕對值編碼器和增量式編碼器。絕對式編碼器可以直接讀取位置信息,而增量式編碼器則需要計算位置信息。還有其他類型的編碼器,如光學編碼器、磁性編碼器和壓電編碼器。光學編碼器使用光電效應將位置信息轉換為數字信號,而磁性編碼器使用磁性效應將位置信息轉換為數字信號。壓電編碼器則利用壓電材料的特性將位置信息轉換為電信號。西門子絕對值編碼器6FX2001-5QN13現貨;山西亨士樂RI58-F/1024EF.42IB旋轉定位編碼器誠信經營

WACHENDORFF(沃申道夫)編碼器WDG58A-3600-ABN-124-S4。編碼器的定義與分類編碼器,簡而言之,是一種用于測量位移、速度或加速度,并將這些物理量轉換為電信號(通常是數字信號)的裝置。根據其工作原理,編碼器大致可以分為光學編碼器、磁性編碼器和電容式編碼器三大類。其中,光學編碼器以其高精度、高分辨率和長壽命等特點,在精密機械控制領域廣受歡迎;而磁性編碼器則因其抗干擾能力強、安裝簡便等優勢,在惡劣環境或高動態應用中占有一席之地。編碼器的工作原理以光學編碼器為例,其內部通常包含一個光源(如LED)、一個刻有精細光柵的碼盤以及一組光電探測器。當碼盤隨軸旋轉時,光柵會周期性地遮擋或允許光線通過,從而在光電探測器上產生一系列明暗交替的光信號。這些光信號經過電路處理后,即可被轉換為一系列數字脈沖,每個脈沖對應碼盤旋轉的一定角度或位移量。通過這種方式,編碼器能夠實時監測并記錄軸的旋轉位置、速度等參數。山西RHI90N-OEAK1R61N-01024倍加福編碼器定制價格OG9DN1024I 堡盟霍普鈉HUNBER編碼器防爆隔爆傳感器 POG10DN 1024I;

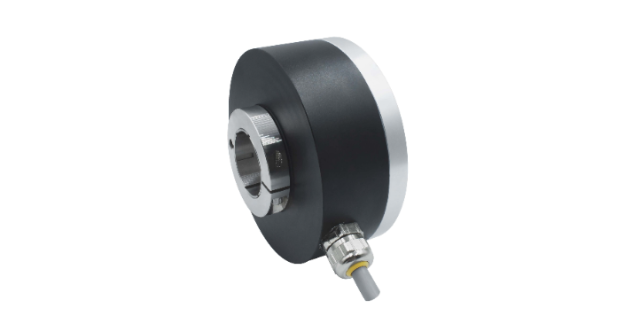
GHA58B-SG-D121T-1213N;編碼器與電機的機械連接:首先,編碼器分實心軸和空心軸兩種,對于實心軸來說,一般采用連軸器作過度件與電機的軸相連,因為連軸器的彈性特性,所以對編碼器起到緩沖和保護的作用。如果是空心軸,可以直接套在與之相連的電機的軸上,然后把編碼器本體通過彈性夾片與電機相連。如此,便可以保證編碼器與電機的同軸同步運轉。電纜及插頭輸出(Cable ,Connector)—編碼器的信號線一般有直接線纜引出和利用航空插頭引出,這個視客戶的具體現場要求而選擇。一般情況電纜直接輸出的IP等級會比接插件式的高一些,因為接插件本身就是有縫隙的,但接插件式的比較方便,便于現場拔插。
增量型旋轉編碼器有分辨率的差異,使用每圈產生的脈沖數來計量,數目從6到5400或更高,脈沖數越多,分辨率越高;這是選型的重要依據之一。2,增量型編碼器通常有三路信號輸出(差分有六路信號):A,B和Z,一般采用TTL電平,A脈沖在前,B脈沖在后,A,B脈沖相差90度,每圈發出一個Z脈沖,可作為參考機械零位。一般利用A超前B或B超前A進行判向,我公司增量型編碼器定義為軸端看編碼器順時針旋轉為正轉,A超前B為90°,反之逆時針旋轉為反轉B超前A為90°。也有不相同的,要看產品說明。3,使用PLC采集數據,可選用高速計數模塊;使用工控機采集數據,可選用高速計數板卡;使用單片機采集數據,建議選用帶光電耦合器的輸入端口。4,建議B脈沖做順向(前向)脈沖,A脈沖做逆向(后向)脈沖,Z原點零位脈沖。倍加福絕對值編碼器ESM58N-F3APNR0BN-1213現貨;

OCD-DPC1B-1212-C10V-H3P,一款款不銹鋼版的博思特絕對值編碼器(Profibus-DP);去年以來,這款編碼器經常有人咨詢。反饋采購比較困難,為什么會這樣?現在我們就展開說一說。這是一款博思特編碼器,通訊協議為Profibus-DP,屬于絕對值編碼器。通過型號我們不難看出它的參數并不是很特殊,軸徑10mm,分辨率為1212。乍一看,就是一個普通的絕對值編碼器。實際上,大家采購困難時因為它的材質問題。這是一款不銹鋼版本的絕對值編碼器。。大多數情況下我們使用的編碼器都是鋁合金的,不銹鋼的占比不是特別多。這一款就屬于相對小眾的編碼器了。TRT58-KA8192R4096C4MT01,TWK絕對值編碼器;石家莊MEYLE梅爾GH0510C293R/2048-DTPS-H編碼器
堡盟旋轉法蘭軸工業編碼器EIL580-SY06.5FQ.01024.A;山西亨士樂RI58-F/1024EF.42IB旋轉定位編碼器誠信經營
TRT58-KA8192R4096C4MT01,TWK絕對值編碼器;更換編碼器后,需要將機器重新調零以確保精細度。調零過程可以分為幾個步驟。首先需要檢查新編碼器是否正確接線,確保信號可以正常傳輸。接著可以通過手動操作機械臂或軸來確定當前位置,并記錄下實際位置值。然后將編碼器的位置值與實際位置值進行比對,如果存在偏差,則需要進行調整。在調整過程中,可以通過調整編碼器零點或機器初始位置等方法來糾正誤差,直到兩個位置值相符為止。完成調零后,還需要進行一些測試以確保機器的精度和穩定性。如果測試結果正常,則可以開始正常的運行。山西亨士樂RI58-F/1024EF.42IB旋轉定位編碼器誠信經營
- 太原hohner霍納AWI 58S 082R011-1000?編碼器貨源充足 2025-08-26
- 石家莊hohner霍納HWI 40S-0631R011?編碼器質保18月 2025-08-26
- 山西hohner霍納HW180S-1261R011-1024?編碼器代理 2025-08-26
- 唐山hohner霍納AWA90S-123A005CO-2048?編碼器質保18月 2025-08-26
- 常州hohner霍納AWI58S-107R013-2048?編碼器現貨銷售 2025-08-26
- 蘇州hohner霍納SWI58S-145R011-100?編碼器防爆性能 2025-08-26
- 山西hohner霍納AWI 58S 082R011-1000?編碼器代理 2025-08-26
- 臨汾hohner霍納AWI 58S 082R011-1000?編碼器誠信經營 2025-08-25
- 唐山hohner霍納AWI58H-0/5000?編碼器廠家直銷 2025-08-25
- 南京hohner霍納HWI80S-1231R001-1000?編碼器防爆性能 2025-08-25
- 連云港hohner霍納AWI58S121 R051-15?編碼器現貨銷售 2025-08-25
- 安徽hohner霍納AWI58S121 R051-15?編碼器創造輝煌 2025-08-25