工程車作為基建施工���、搶險(xiǎn)救援的 “主力軍”�,其作業(yè)環(huán)境往往伴隨著狹窄通道����、密集人流、重型設(shè)備交錯(cuò)等特點(diǎn)����,而車輛自身的高大車身與復(fù)雜結(jié)構(gòu)(如起重機(jī)的吊臂�、挖掘機(jī)的鏟斗)�����,進(jìn)一步擴(kuò)大了駕駛員的視覺(jué)盲區(qū)�����,成為安全作業(yè)的 “心腹大患”��。工程車盲區(qū)防碰撞預(yù)警系統(tǒng)通過(guò)融合物聯(lián)網(wǎng)、人工智能與機(jī)器視覺(jué)技術(shù),為特種工程車量身打造 “動(dòng)態(tài)安全結(jié)界”��,重新定義作業(yè)安全標(biāo)準(zhǔn)���。系統(tǒng)采用 “多傳感器融合” 方案:除車身四周的 4 顆 210 度超廣角 AI 攝像頭外�,還集成了毫米波雷達(dá)與超聲波傳感器。攝像頭負(fù)責(zé)捕捉高清畫面并識(shí)別目標(biāo)類型(行人、車輛�、固定障礙物)�����,雷達(dá)則測(cè)算目標(biāo)與車輛的實(shí)時(shí)距離及相對(duì)速度,兩者數(shù)據(jù)交叉驗(yàn)證,避免因惡劣天氣(雨�、霧�、強(qiáng)光)或復(fù)雜背景(粉塵�、障礙物遮擋)導(dǎo)致的誤報(bào)、漏報(bào)。例如,在隧道施工中,當(dāng)工人穿著反光衣靠近工程車時(shí)���,攝像頭優(yōu)先識(shí)別 “人形特征”���,雷達(dá)同步確認(rèn)距離小于 2 米����,系統(tǒng)立即啟動(dòng)預(yù)警 —— 不僅駕駛室內(nèi)警報(bào)響起,車外安裝的定向揚(yáng)聲器還會(huì)對(duì)目標(biāo)區(qū)域發(fā)出 “請(qǐng)注意�����,車輛靠近��!” 的語(yǔ)音提示�����,雙向提醒確保安全。工程車前向防碰撞預(yù)警系統(tǒng)��,通過(guò)毫米波雷達(dá)實(shí)時(shí)監(jiān)測(cè)車前環(huán)境��。內(nèi)蒙古主動(dòng)安全防碰撞預(yù)警專賣
油罐車運(yùn)輸?shù)氖且兹家妆kU(xiǎn)品�����,一旦發(fā)生碰撞,后果不堪設(shè)想�����。佳興偉誠(chéng)的油罐車防碰撞預(yù)警系統(tǒng)在車頭��、車尾及罐體兩側(cè)安裝高精度雷達(dá)��,能探測(cè) 100 米范圍內(nèi)的目標(biāo)����,結(jié)合油罐車的速度計(jì)算碰撞風(fēng)險(xiǎn)��。當(dāng)與前車距離過(guò)近,系統(tǒng)會(huì)發(fā)出 “保持安全距離,防止追尾” 的一級(jí)預(yù)警�;當(dāng)有車輛從側(cè)方逼近���,會(huì)觸發(fā)二級(jí)預(yù)警�����,除了聲光報(bào)警,還會(huì)通過(guò)車載系統(tǒng)向車隊(duì)管理中心發(fā)送預(yù)警信息�����。系統(tǒng)還具備泄漏監(jiān)測(cè)聯(lián)動(dòng)功能�,當(dāng)檢測(cè)到可能的碰撞導(dǎo)致罐體異常�����,會(huì)立即提醒司機(jī)停車檢查。該系統(tǒng)的防爆設(shè)計(jì)符合危險(xiǎn)品運(yùn)輸標(biāo)準(zhǔn)�����,為油罐車運(yùn)輸筑起一道堅(jiān)不可摧的安全防線�。佳木斯商用車前向防碰撞預(yù)警多少錢車輛防碰撞預(yù)警系統(tǒng)低功耗運(yùn)行,不影響工程車電路����,長(zhǎng)期使用無(wú)需頻繁充電或維護(hù)��,為車輛持續(xù)提供安全保障。
工程車輛盲區(qū)視覺(jué) 360 防碰撞預(yù)警系統(tǒng)是專為挖掘機(jī)�����、裝載機(jī)等大型工程車輛設(shè)計(jì)的安全輔助系統(tǒng)�,通過(guò)多維度視覺(jué)感知與智能算法����,實(shí)時(shí)監(jiān)測(cè)車輛周圍盲區(qū)的人員、障礙物等潛在危險(xiǎn),以聲光報(bào)警、圖像顯示等方式提醒駕駛員����,減少碰撞事故���。?系統(tǒng)由感知層��、處理層和預(yù)警層構(gòu)成。感知層含 4-6 個(gè)超廣角高清攝像頭,覆蓋 3-10 米盲區(qū)�,支持夜視和 IP6K9K 級(jí)防水防塵�����,還可搭配雷達(dá)應(yīng)對(duì)惡劣天氣;處理層運(yùn)用圖像拼接、目標(biāo)檢測(cè)與追蹤算法及危險(xiǎn)等級(jí)評(píng)估技術(shù)�����;預(yù)警層通過(guò)車載顯示屏和內(nèi)外聲光裝置實(shí)現(xiàn)預(yù)警���。?其技術(shù)優(yōu)勢(shì)在于盲區(qū)覆蓋率超 90%�,AI 算法能快速識(shí)別目標(biāo)減少誤報(bào),且響應(yīng)延遲<200ms。典型應(yīng)用場(chǎng)景包括建筑施工場(chǎng)地��、礦山�、市政工程、港口與物流園區(qū)等����。該系統(tǒng)能降低 60%-80% 的盲區(qū)事故率,滿足相關(guān)合規(guī)要求��,還能提高作業(yè)效率���。
商用車因車身寬大��、駕駛室位置高�����,存在較大的側(cè)方、后方盲區(qū)��,在城市道路行駛或場(chǎng)站??繒r(shí),易與非機(jī)動(dòng)車����、行人及小型車輛發(fā)生碰撞事故���。商用車盲區(qū)防碰撞預(yù)警系統(tǒng)專為解決這一問(wèn)題設(shè)計(jì)�����,由安裝在車身兩側(cè)后視鏡下方�����、尾部的毫米波雷達(dá),車門立柱上的警示燈��,駕駛室內(nèi)的顯示屏及語(yǔ)音報(bào)警器組成�,可實(shí)時(shí)監(jiān)測(cè)盲區(qū)范圍內(nèi)的移動(dòng)物體。系統(tǒng)具備動(dòng)態(tài)監(jiān)測(cè)與分級(jí)預(yù)警功能����,能將盲區(qū)目標(biāo)的距離、運(yùn)動(dòng)軌跡等信息在顯示屏上直觀呈現(xiàn)��;當(dāng)目標(biāo)處于較遠(yuǎn)的預(yù)警區(qū)域時(shí)����,觸發(fā)一級(jí)預(yù)警,對(duì)應(yīng)側(cè)的車門立柱警示燈亮起黃色燈光��,同時(shí)語(yǔ)音播報(bào) “注意側(cè)方盲區(qū)”�;若目標(biāo)進(jìn)入危險(xiǎn)范圍,立即啟動(dòng)二級(jí)預(yù)警��,警示燈變?yōu)榧t色并持續(xù)閃爍���。工程車防碰撞預(yù)警系統(tǒng)利用高精度傳感器���,實(shí)時(shí)監(jiān)測(cè)車輛周邊環(huán)境���,準(zhǔn)確識(shí)別潛在碰撞風(fēng)險(xiǎn)��,為司機(jī)提前預(yù)警�����。

工程車輛 360 全景實(shí)時(shí)盲區(qū)防碰撞預(yù)警系統(tǒng)功能豐富,可直接與倒車?yán)走_(dá)連接���,也適用于自動(dòng)化機(jī)械設(shè)備、配電箱等����。其外觀小巧����,報(bào)警音量達(dá) 105dB�,有旋轉(zhuǎn)���、閃爍等 4 種燈光模式��,工作方式包括通電觸發(fā)報(bào)警��、信號(hào)觸發(fā)、RS485 通訊控制。?該系統(tǒng)能在車輛啟動(dòng)、左右轉(zhuǎn)彎����、倒車及右側(cè)盲區(qū)等場(chǎng)景進(jìn)行對(duì)應(yīng)語(yǔ)音播報(bào)�����,還支持客戶定制語(yǔ)音和不同語(yǔ)種播報(bào)。與 360° 全景 AI 預(yù)警主機(jī)配合使用時(shí),可自動(dòng)檢測(cè)駕駛員四周視野盲區(qū)���,出現(xiàn)車輛或移動(dòng)物體時(shí)發(fā)出告警,通過(guò)喇叭提示,顯示動(dòng)態(tài)軌跡,提供全天候無(wú)盲區(qū)車周實(shí)時(shí)畫面。?結(jié)合物體識(shí)別算法及智能 ADAS 物體識(shí)別算法,能實(shí)時(shí)處理車道線及車周物體�,提前判別危險(xiǎn)區(qū)域�,減少刮傷�、碰撞等事故,提升行駛安全。具備DSM的工程車防碰撞預(yù)警系統(tǒng)����,通過(guò)分析司機(jī)的眼球及神態(tài)����,判斷司機(jī)是否處于疲勞或分心狀態(tài)�����。通遼機(jī)場(chǎng)工程車防碰撞預(yù)警價(jià)格
工程車防碰撞預(yù)警系統(tǒng)通過(guò)實(shí)時(shí)顯示車輛與障礙物的距離�����,讓司機(jī)直觀了解當(dāng)前安全狀況。內(nèi)蒙古主動(dòng)安全防碰撞預(yù)警專賣
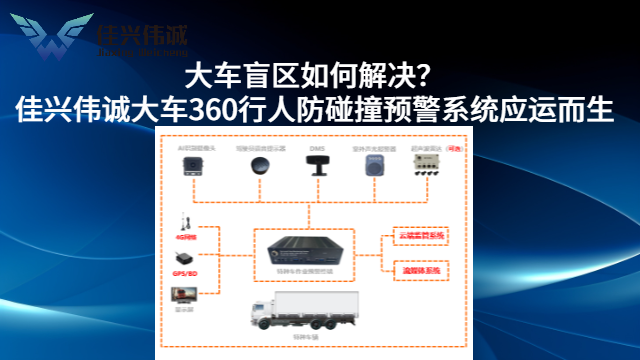
由于工程車屬于大型車輛,具有車身長(zhǎng)�����,駕駛位置高��,軸距大等特點(diǎn)�����,車身周圍存在大片視覺(jué)盲區(qū)。工程車在作業(yè)過(guò)程中,單憑駕駛員視覺(jué)操作�����,那這些由車身引起的盲區(qū)就極大發(fā)生危險(xiǎn)事故���,在調(diào)查過(guò)程中顯示�,很多事故造成大多是因?yàn)椋苓呠囕v人員不知不覺(jué)走進(jìn)工程車盲區(qū)范圍內(nèi)駕駛員看不到而引發(fā)���,為此佳興偉誠(chéng)科技研發(fā)出工程車四路BSD盲區(qū)防碰撞預(yù)警系統(tǒng)。工程車四路BSD盲區(qū)防碰撞預(yù)警系統(tǒng)�,通過(guò)在工程車車身周圍各加裝一個(gè)BSD盲區(qū)偵測(cè)攝像頭來(lái)監(jiān)測(cè)車身周圍的環(huán)境��,經(jīng)過(guò)算法處理在司機(jī)駕駛室內(nèi)中控屏上呈現(xiàn)出一個(gè)四分割畫面,司機(jī)可以清楚地看到工程車車身周邊情況�,完美的解決因工程車盲區(qū)問(wèn)題����。當(dāng)工程車在作業(yè)時(shí)����,車身周邊作業(yè)范圍闖入車輛或人員,攝像頭會(huì)立即捕捉闖入人員或車輛的位置,上報(bào)給主機(jī)�,主機(jī)聯(lián)動(dòng)聲光報(bào)警器立即播報(bào)“您已進(jìn)入危險(xiǎn)區(qū)域�����,請(qǐng)立即遠(yuǎn)離”�,司機(jī)也可以在中控屏上清晰看到闖入人員或車輛位置,避免操作不當(dāng)而造成危險(xiǎn)事故���。內(nèi)蒙古主動(dòng)安全防碰撞預(yù)警專賣