能源與電力領(lǐng)域控制算法國產(chǎn)平臺需具備自主可控的關(guān)鍵技術(shù),支持微電網(wǎng)、風(fēng)電、智能電網(wǎng)等場景的算法開發(fā)。平臺應(yīng)集成多物理場建模工具,能構(gòu)建光伏、儲能、電機等設(shè)備的協(xié)同控制模型,實現(xiàn)功率分配、頻率調(diào)節(jié)等算法的仿真與驗證。需提供模塊化算法庫,涵蓋下垂控制、虛擬同步機等重點策略,支持用戶自定義邏輯擴(kuò)展,適配不...
控制算法基本參數(shù)
- 品牌
- Ganztech
- 型號
- 控制算法
- 軟件類型
- 仿真建模軟件
- 版本類型
- 網(wǎng)絡(luò)版
- 語言版本
- 簡體中文版
控制算法企業(yè)商機
電驅(qū)動系統(tǒng)邏輯算法基于電磁感應(yīng)與控制理論,實現(xiàn)電機轉(zhuǎn)速、扭矩的準(zhǔn)確調(diào)控,重點包括矢量控制(FOC)與直接轉(zhuǎn)矩控制(DTC)等技術(shù)。矢量控制通過Clark、Park變換將三相交流電分解為直軸與交軸分量,實現(xiàn)磁通與轉(zhuǎn)矩的解耦控制,通過電流環(huán)、速度環(huán)的閉環(huán)調(diào)節(jié),準(zhǔn)確跟蹤目標(biāo)扭矩,動態(tài)響應(yīng)速度可達(dá)毫秒級;直接轉(zhuǎn)矩控制則直接計算與控制電機的磁鏈和轉(zhuǎn)矩,響應(yīng)速度更快,適用于動態(tài)性能要求高的場景,如電動汽車急加速工況。無位置傳感器控制(如滑模觀測器)通過估算轉(zhuǎn)子位置,省去位置傳感器,降低成本并提高可靠性,SiC器件驅(qū)動算法則能優(yōu)化開關(guān)頻率,減少開關(guān)損耗,提升電驅(qū)動系統(tǒng)效率。汽車領(lǐng)域控制算法軟件廠家需技術(shù)扎實,適配多控制器,助力車企高效開發(fā)。北京智能駕駛車速跟蹤控制器算法的作用

電驅(qū)動系統(tǒng)控制算法基于電磁感應(yīng)與閉環(huán)控制理論,實現(xiàn)電機扭矩、轉(zhuǎn)速的調(diào)控,重點是建立電流、磁場與機械運動的關(guān)聯(lián)模型。以永磁同步電機為例,矢量控制(FOC)算法通過Clark變換將三相交流電流轉(zhuǎn)換為兩相靜止坐標(biāo)系(α-β軸)分量,再經(jīng)Park變換得到同步旋轉(zhuǎn)坐標(biāo)系(d-q軸)下的直軸電流(勵磁分量)與交軸電流(轉(zhuǎn)矩分量),實現(xiàn)磁通與轉(zhuǎn)矩的解耦控制,通過電流環(huán)、速度環(huán)的PI調(diào)節(jié),使實際電流準(zhǔn)確跟蹤指令值,從而實現(xiàn)扭矩的線性輸出控制。無位置傳感器控制算法則通過觀測電機反電動勢過零點或采用模型參考自適應(yīng)方法估算轉(zhuǎn)子位置與轉(zhuǎn)速,省去物理位置傳感器,降低系統(tǒng)成本并提高可靠性,滿足電驅(qū)動系統(tǒng)高效、緊湊、高動態(tài)響應(yīng)的設(shè)計需求。杭州模糊邏輯算法的作用機器人運動控制算法好用的軟件,需支持軌跡規(guī)劃與仿真,讓算法驗證高效準(zhǔn)確。
工業(yè)自動化領(lǐng)域邏輯算法軟件廠家專注于為生產(chǎn)線、裝備設(shè)備提供邏輯控制解決方案,具備深厚的行業(yè)經(jīng)驗與技術(shù)積累。廠家需開發(fā)支持梯形圖、結(jié)構(gòu)化文本、功能塊圖等編程語言的軟件平臺,實現(xiàn)邏輯算法的可視化編程與在線調(diào)試;提供豐富的功能塊庫,涵蓋邏輯運算(與或非、比較)、時序控制(定時器、計數(shù)器)、聯(lián)鎖保護(hù)(急停邏輯、安全互鎖)等常用功能,適配不同行業(yè)需求。服務(wù)包括根據(jù)客戶需求定制行業(yè)算法模塊,如汽車焊裝線的機器人焊接時序協(xié)同邏輯、食品包裝線的質(zhì)量檢測與剔除控制;提供全流程技術(shù)支持,協(xié)助完成算法與PLC、DCS、工業(yè)機器人等硬件的集成調(diào)試,解決通信兼容、實時性不足等問題,確保生產(chǎn)線穩(wěn)定運行。
控制器算法是連接感知與執(zhí)行的關(guān)鍵橋梁,通過對輸入信號的分析處理生成準(zhǔn)確控制指令,實現(xiàn)系統(tǒng)的預(yù)期運行狀態(tài)。在工業(yè)設(shè)備中,算法將傳感器采集的溫度、壓力、位置等信號轉(zhuǎn)化為執(zhí)行器(如閥門、電機)的動作指令,如調(diào)節(jié)閥門開度控制介質(zhì)流量;在汽車領(lǐng)域,將駕駛員操作信號與環(huán)境感知數(shù)據(jù)融合,生成電機扭矩、制動壓力等指令,實現(xiàn)車輛加減速與轉(zhuǎn)向控制。算法能補償系統(tǒng)特性差異,如設(shè)備老化導(dǎo)致的響應(yīng)滯后,通過前饋控制與參數(shù)自適應(yīng)調(diào)整維持控制精度;同時具備故障診斷與容錯能力,在傳感器失效、執(zhí)行器卡滯等異常時觸發(fā)報警或切換備用控制策略,保障系統(tǒng)安全穩(wěn)定運行,是自動化與智能化系統(tǒng)的重點支撐。控制器算法國產(chǎn)平臺支持算法開發(fā)與部署,適配多場景,助力技術(shù)自主可控。

汽車領(lǐng)域控制算法需兼顧實時性、可靠性、適應(yīng)性三大特點,以滿足車輛復(fù)雜運行環(huán)境與安全要求。實時性體現(xiàn)在算法需在微秒至毫秒級內(nèi)完成信號采集、計算與指令輸出,如ESP系統(tǒng)需迅速響應(yīng)側(cè)滑信號并觸發(fā)制動干預(yù),避免車輛失控;可靠性要求算法在傳感器噪聲干擾、電磁輻射、元器件參數(shù)漂移等情況下仍能穩(wěn)定工作,通過卡爾曼濾波、中位值平均濾波等技術(shù)減少異常數(shù)據(jù)影響,結(jié)合功能冗余設(shè)計(如雙CPU核校驗)確保關(guān)鍵功能不失效;適應(yīng)性則指算法能適配不同路況(如鋪裝路、泥濘路、冰雪路)、載荷(如空載、滿載、偏載)與駕駛風(fēng)格(如激進(jìn)駕駛、平穩(wěn)駕駛),動態(tài)調(diào)整控制參數(shù),如動力控制算法根據(jù)油門踏板開度變化率優(yōu)化輸出曲線,確保不同駕駛員的操作體驗一致性。工業(yè)自動化領(lǐng)域控制算法好用的軟件,需適配產(chǎn)線,支持快速開發(fā)與部署,提升控制精度。重慶自動化生產(chǎn)智能控制算法有哪些開發(fā)公司
汽車領(lǐng)域控制算法研究聚焦性能優(yōu)化,提升車輛控制精度與安全性,助力智能化。北京智能駕駛車速跟蹤控制器算法的作用
能源與電力領(lǐng)域控制算法在優(yōu)化能源利用效率、保障系統(tǒng)穩(wěn)定運行、促進(jìn)新能源消納等方面發(fā)揮關(guān)鍵作用。在微電網(wǎng)中,控制算法通過協(xié)調(diào)光伏逆變器、儲能系統(tǒng)、柴油發(fā)電機等分布式電源與負(fù)荷,實時實現(xiàn)功率平衡與電壓/頻率穩(wěn)定,實現(xiàn)可再生能源利用率提升;風(fēng)力發(fā)電中,MPPT算法通過追蹤風(fēng)速-轉(zhuǎn)速更優(yōu)匹配曲線更大化風(fēng)能捕獲,變槳控制算法在風(fēng)速超過額定值時調(diào)整葉片角度,保障機組在強風(fēng)下安全運行并維持額定功率輸出。智能電網(wǎng)中,自動發(fā)電控制(AGC)與需求響應(yīng)算法動態(tài)平衡發(fā)電側(cè)與用電側(cè),通過峰谷電價引導(dǎo)用戶錯峰用電,減少棄風(fēng)棄光現(xiàn)象,同時優(yōu)化輸電網(wǎng)絡(luò)潮流分配,降低線損。此外,控制算法能增強系統(tǒng)抗擾動能力,在負(fù)荷突變、設(shè)備故障時快速調(diào)整控制量,維持電力系統(tǒng)可靠運行。北京智能駕駛車速跟蹤控制器算法的作用
與控制算法相關(guān)的文章
江西裝備制造智能控制算法工具推薦
- 山東模糊智能控制算法軟件報價 2025-08-27
- 廣西新能源控制器算法哪個軟件好 2025-08-27
- 山東裝備制造智能控制算法有哪些靠譜平臺 2025-08-26
- 福建汽車電子控制系統(tǒng)控制算法的作用 2025-08-26
- 江西PID智能控制算法的作用 2025-08-25
- 陜西PID控制算法國產(chǎn)平臺 2025-08-25
- 廣東模糊智能控制算法用什么工具 2025-08-24
- 福建裝備制造控制算法軟件服務(wù)商 2025-08-23
- 上海智能駕駛車速跟蹤控制算法有哪些特點 2025-08-21
- 銀川自動化生產(chǎn)智能控制算法有哪些特點 2025-08-21
- 黑龍江新能源邏輯算法 2025-08-21
- 甘肅汽車電子控制系統(tǒng)智能控制算法哪個軟件好 2025-08-21
與控制算法相關(guān)的產(chǎn)品



與控制算法相關(guān)的新聞
-
湖北汽車電子控制系統(tǒng)智能控制算法軟件服務(wù)商 2025-08-19 01:11:37工業(yè)自動化領(lǐng)域控制算法基于反饋控制理論,通過感知-決策-執(zhí)行的閉環(huán)流程實現(xiàn)生產(chǎn)過程的自動調(diào)控。其關(guān)鍵是建立被控對象的數(shù)學(xué)模型(如傳遞函數(shù)、狀態(tài)方程),描述輸入(如原料進(jìn)料量、電機轉(zhuǎn)速)與輸出(如產(chǎn)品濃度、加工尺寸)的動態(tài)關(guān)系,算法根據(jù)設(shè)定值與實際值的偏差計算執(zhí)行器的調(diào)節(jié)量。在連續(xù)生產(chǎn)(如化工、冶金)...
-
烏魯木齊模糊控制器算法國產(chǎn)平臺 2025-08-19 06:20:54機器人運動控制算法是實現(xiàn)準(zhǔn)確動作的關(guān)鍵,通過軌跡規(guī)劃與動態(tài)調(diào)節(jié)確保操作精度與安全性。軌跡規(guī)劃階段生成平滑路徑,采用多項式插值避免運動中的沖擊與振動,如機械臂焊接的連續(xù)軌跡;控制階段實時修正偏差,補償機械間隙與負(fù)載變化,保證末端執(zhí)行器定位精度在毫米級以內(nèi)。在協(xié)作場景中,算法融合力反饋實現(xiàn)柔性的交互,如...
-
湖南自動化生產(chǎn)智能控制算法有哪些特點 2025-08-19 02:09:55控制器算法是連接感知與執(zhí)行的關(guān)鍵橋梁,通過對輸入信號的分析處理生成準(zhǔn)確控制指令,實現(xiàn)系統(tǒng)的預(yù)期運行狀態(tài)。在工業(yè)設(shè)備中,算法將傳感器采集的溫度、壓力、位置等信號轉(zhuǎn)化為執(zhí)行器(如閥門、電機)的動作指令,如調(diào)節(jié)閥門開度控制介質(zhì)流量;在汽車領(lǐng)域,將駕駛員操作信號與環(huán)境感知數(shù)據(jù)融合,生成電機扭矩、制動壓力等指...
-
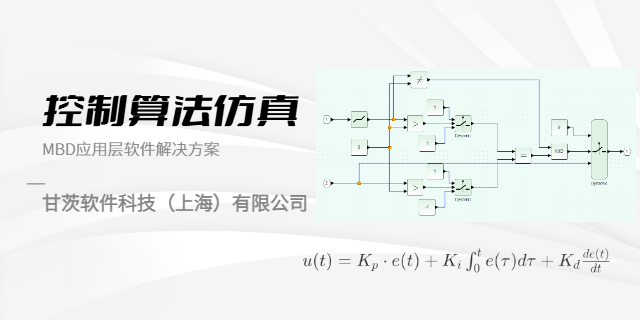
甘肅PID控制器算法軟件廠家 2025-08-19 05:11:31PID智能控制算法在傳統(tǒng)PID基礎(chǔ)上融合自適應(yīng)與智能決策能力,通過動態(tài)調(diào)整比例、積分、微分參數(shù)適應(yīng)復(fù)雜工況。算法可結(jié)合模糊邏輯判斷系統(tǒng)運行狀態(tài),如在非線性系統(tǒng)中自動修正參數(shù)權(quán)重,解決常規(guī)PID在參數(shù)整定后適應(yīng)性不足的問題;融入神經(jīng)網(wǎng)絡(luò)模型時,能通過學(xué)習(xí)歷史數(shù)據(jù)優(yōu)化控制策略,提升對時變系統(tǒng)的調(diào)控精度。...
與控制算法相關(guān)的問題
與控制算法相關(guān)的標(biāo)簽
新聞資訊
產(chǎn)品推薦
-

湖南圖形化建模基于模型設(shè)計市場報價
2025-08-27 -

沈陽自動代碼生成MBD什么品牌好
2025-08-27 -
浙江汽車控制器軟件MBD國產(chǎn)平臺
2025-08-27 -

浙江整車制動性能汽車模擬仿真實施方案
2025-08-27 -
廣西仿真驗證基于模型設(shè)計開發(fā)費用
2025-08-27 -

山東裝備制造智能控制算法有哪些靠譜平臺
2025-08-26 -

浙江圖形化建模MBD有哪些工具
2025-08-26 -

浙江低成本科學(xué)分析什么品牌服務(wù)好
2025-08-26 -
陜西應(yīng)用層軟件開發(fā)MBD優(yōu)勢有哪些
2025-08-26