(上篇)主動安全預警系統在解決超長掛車的視覺盲區問題時,可以采取多種技術手段和策略,以下是一些具體的解決方案:
一、攝像頭與360°全景影像系統安裝多個高清攝像頭:在掛車的車頭、車尾以及兩側后視鏡下方等關鍵位置安裝高清攝像頭。攝像頭應具有高清晰度、低畸變和寬視角等特點,以確保拍攝到的畫面清晰、準確。360°全景影像系統:通過攝像頭拍攝到的圖像數據,系統生成一個覆蓋360°的全景視圖。駕駛員可以通過車內的顯示屏實時查看車輛周圍的環境,有效減少視覺盲區。
二、雷達與傳感器技術雷達傳感器:使用雷達傳感器實時監測掛車周圍的障礙物。雷達傳感器可以檢測移動或靜止的物體,特別是在惡劣天氣條件下也能保持穩定的性能。超聲波傳感器:超聲波傳感器用于近距離檢測障礙物。它們可以安裝在掛車的各個角落,以提供全方WEI的監測。
三、盲區監測與預警系統盲區監測系統:結合雷達和攝像頭技術,實時監測掛車的盲區。當有車輛或行人進入盲區時,系統會發出聲音或圖像警報,提醒駕駛員注意。轉向盲區警示燈:在掛車打轉向燈時,自動開啟轉向盲區警示燈。警示燈可以提醒周圍車輛和行人注意掛車的轉向動作,避免碰撞。
AI360全景影像系統的圖像處理單元將各個攝像頭的視頻信號進行解碼,縮放,拼接等處理,然后輸出到顯示屏上.天津建筑物多路視頻拼接系統開發平臺
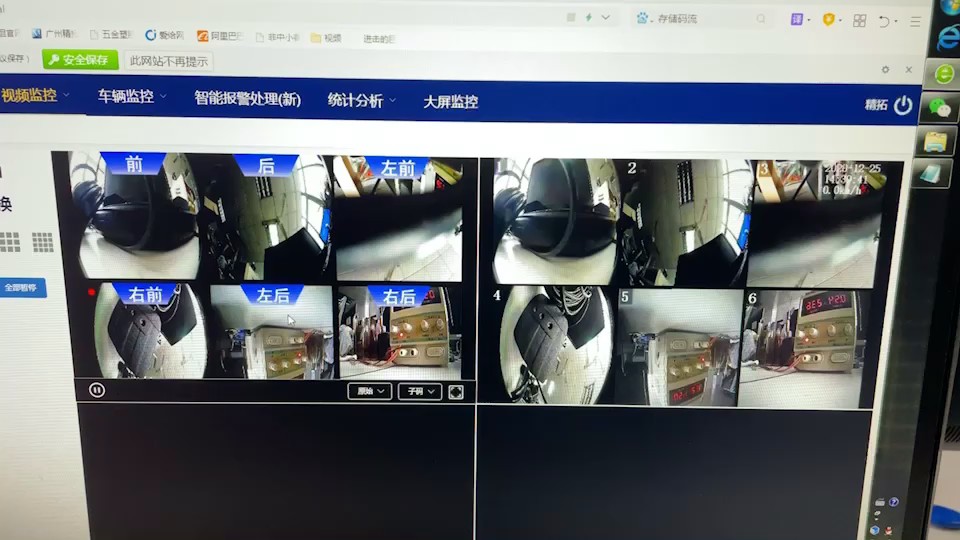
(中篇)8路視頻實時顯示于智能顯控終端的AI360全景影像系統,是通過一系列先進的技術和算法實現的。以下是對其工作原理的詳細解析:
圖像拼接與生成:圖像拼接與生成單元利用先進的圖像拼接算法,將多個攝像頭捕捉到的圖像拼接成一張完整的360度全景圖像。這一過程中,算法會考慮圖像之間的重疊區域,并進行精確的匹配和融合,以確保拼接后的圖像自然、流暢。實時顯示與交互:生成的360度全景圖像被實時傳輸到智能顯控終端上,并顯示在屏幕上。用戶可以通過交互界面進行縮放、旋轉等操作,以查看不同角度的圖像。同時,系統還可能提供智能分析功能,如識別障礙物、行人等,并在必要時發出預警。
三、關鍵技術圖像拼接算法:圖像拼接算法是實現8路視頻實時顯示于智能顯控終端的關鍵技術之一。該算法需要能夠處理大量的圖像數據,并能夠在短時間內完成圖像的拼接和融合工作。實時傳輸技術:為了實現8路視頻的實時傳輸和顯示,系統需要采用高效的實時傳輸技術。這包括數據壓縮、編碼、解碼等過程,以確保圖像數據能夠穩定、快速地傳輸到智能顯控終端上。 江蘇360全景多路視頻拼接系統推薦廠家AI8路360全景影像集成系統通過高效的視頻流處理技術,將8個攝像頭采集的視頻流進行實時處理,同步和拼接.

(下篇)主動安全預警系統對于掛車來說,是解決后方盲區問題的一種有效技術手段。以下是一些關于如何在掛車上安裝主動安全預警系統以解決后方盲區問題的建議:
安裝傳感器:按照制造商的說明,將雷達和攝像頭等傳感器安裝在確定的位置上。確保傳感器固定牢固,并且與車輛的其他部分保持適當的距離,以避免干擾。連接系統:將傳感器與主動安全預警系統的控制單元連接起來。這通常涉及到電氣連接和信號傳輸。確保連接正確無誤,并且符合相關的電氣安全標準。調試和測試:安裝完成后,對系統進行調試和測試。確保傳感器能夠正常工作,并且系統能夠準確地發出警告。同時,檢查系統的顯示屏是否清晰、易于觀察。
四、輔助措施定期維護:定期檢查和維護主動安全預警系統,確保其處于良好的工作狀態。如果發現任何問題或故障,及時聯系制造商或維修人員進行修理。駕駛員培訓:對駕駛員進行關于主動安全預警系統的培訓,使他們了解系統的功能和操作方法。這有助于駕駛員更好地利用系統來減少盲區風險。主動安全預警系統應與其他安全措施相結合,如使用后視鏡、倒車雷達等。這樣可以提供更全MIAN的安全保障。
綜上所述,通過安裝主動安全預警系統,掛車的后方盲區問題可以得到有效解決。
(上篇)多路視頻實時傳輸與智能顯控終端在主動安全預警系統中扮演著至關重要的角色,它們共同提升了系統的安全性、可靠性和實用性。以下是對這兩者在主動安全預警系統中重要意義的具體闡述:
一、多路視頻實時傳輸的重要意義全MIAN監控與實時反饋:多路視頻實時傳輸能夠確保主動安全預警系統對監控區域進行全MIAN覆蓋,無論是車輛周圍還是道路環境,都能得到實時的視頻監控。這種全MIAN的監控有助于系統及時發現潛在的安全隱患,如行人闖入、車輛違章等,從而及時發出預警,避免事故的發生。提高預警精度與效率:通過多路視頻實時傳輸,系統可以獲取更豐富的圖像信息,這些信息經過處理后能夠更準確地判斷潛在的危險情況。實時傳輸的視頻信息還可以為系統提供及時的反饋,幫助系統調整預警策略,提高預警的精度和效率。支持遠程監控與指揮:多路視頻實時傳輸使得遠程監控成為可能,監控中心可以實時查看各個監控點的視頻信息,并根據需要進行遠程指揮和調度。這在應對突發事件時尤為重要,可以迅速調動資源,提高應急響應速度和效率。 BSD盲區監測功能是在360全景影像系統的基礎上實現的.

(上篇)AI360全景影像集成4G網口輸出并帶有BSD(Blind Spot Detection)預警功能的應用原理,主要基于視頻拼接技術、4G通信技術、系統集成與兼容性技術,以及先進的圖像處理和智能識別算法。以下是其詳細的應用原理:
一、視頻拼接技術AI360全景影像系統通過多個(通常為8個)廣角攝像頭同時采集車輛或工程機械四周的影像。這些攝像頭安裝在車輛的前、后、左、右等關鍵位置,以確保能夠捕捉到全方WEI的圖像信息。系統利用先進的圖像處理算法,如圖像配準、顏色校正、圖像融合等,將多個攝像頭捕捉到的畫面無縫、平滑地拼接在一起,形成一個完整的360度全景畫面。這一過程中,系統還需考慮不同攝像頭之間的時間同步和視角匹配問題,以確保拼接的準確性和實時性。
二、4G通信技術AI360全景影像系統內置4G通信模塊,支持4G網絡的通信協議和傳輸機制。這一功能使得系統能夠將實時視頻數據、智能識別數據等傳輸到遠程管理平臺或手機APP上,實現遠程監控與管理。通過4G網絡,用戶可以隨時隨地查看車輛或工程機械的狀態、行駛軌跡、周邊環境等信息。同時,針對復雜多變的網絡環境,4G傳輸功能可以進行優化,確保數據傳輸的穩定性和低延遲。 觸控一體系統集成了多種傳感器和攝像頭,能夠實時監控車輛周圍環境,多路視頻上傳智慧云平臺,便于分析管理.江蘇360全景多路視頻拼接系統推薦廠家
8路AI360全景影像視頻高清晰度和穩定性還可以確保駕駛員在惡劣環境下仍然能夠清晰地看到周圍環境.天津建筑物多路視頻拼接系統開發平臺
(中篇)360°全景環視融合超聲波雷達系統在現代汽車、工程車、無人機以及工業自動化等領域中發揮著重要作用。這一系統不僅提供了全方WEI的視覺監控,還結合了超聲波雷達的精確測距能力,實現了多路視頻上傳功能,極大地提升了安全性和可靠性。以下是該系統的具體應用:
二、多路視頻上傳功能實現視頻采集與傳輸:360°全景環視系統通過四個超廣角攝像頭實時采集車身周圍的視頻數據,并將這些數據通過高速傳輸接口(如LVDS、HDMI等)傳輸到視頻處理主機。視頻處理與合成:視頻處理主機對接收到的視頻數據進行處理,包括去噪、增強、拼接等步驟,ZUI終合成一個360度全景圖像。同時,主機還負責將超聲波雷達的測距數據融合到全景圖像中,形成帶有距離信息的全景圖像。多路視頻上傳:處理后的全景圖像和測距數據可以通過網絡接口(如以太網、Wi-Fi等)上傳到遠程服務器或云端存儲平臺。這樣,管理人員就可以在控制中心實時查看車輛的駕駛情況,對駕駛員進行遠程指導和監督。此外,多路視頻上傳功能還可以為事故調查提供多角度的有力證據。 天津建筑物多路視頻拼接系統開發平臺